
Creating COLLADA (.dae) files for visual tag in Gazebo/ROS
Hi,
I am on Ubuntu 16.04 LTS and ROS Kinetic right now and trying to import a model that I designed in SolidWorks (a simple tree made with sticks, its in a .sldprt file) into my Gazebo simulation. I know that URDF files only support .stl and collada (.dae) files and that I should use .stl files for the collision tag and .dae for the visual tag. I can properly export my model using the SolidWorks2URDF plugin ( http://wiki.ros.org/sw_urdf_exporter ) and I get a package with an URDF file which includes an .stl file for both visual and collision tags, because the exporter doesn't export any collada (.dae) files.
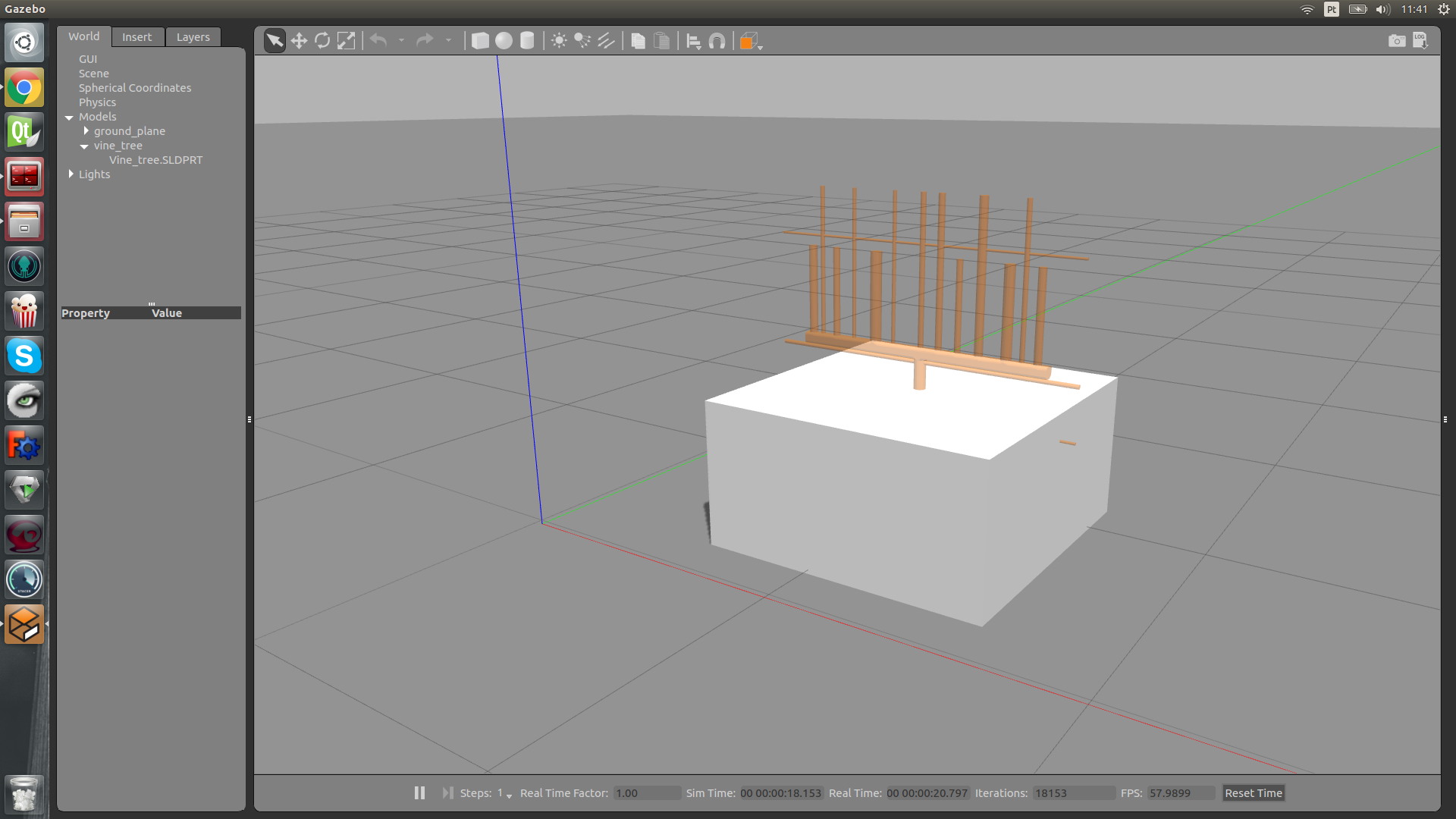
I tried to use the SimLab Soft Collada Exporter for SolidWorks to export my model into to a collada file but when I tried to use it in the simulation, the only thing that appears is a white cube (???) and I don't know why because if I open the file in FreeCad, I can see my tree with no problems, except the fact that it is colourless and I don't know why... first my model had a wood appearence but then I changed it to a brown color, just to check that the appearance had nothing to do with this, but I still see the white cube as my visual object while my collision object (orange) stays correct:
I have also tried to convert my model file from .sldprt to .stp file (format 214 so that it also has colors but not appearances) and follow the steps in here http://gazebosim.org/tutorials?tut=gu... to convert my file into a collada one but everything remains the same.
Can somebody help me on how to do this? Thanks in advance!
Best regards, José Brito
