
Setting up move_base / Navigation Stack
Hi,
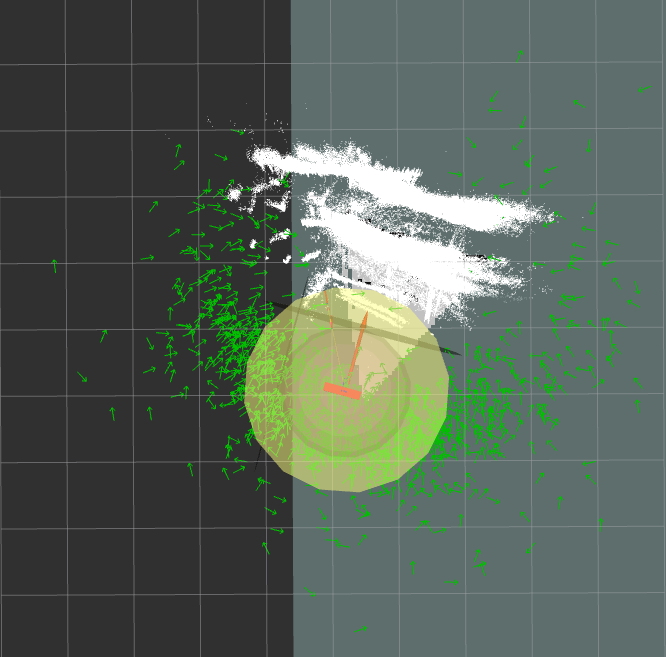
I was following the tutorial to set up the Nav Stack on a robot, but at the end I got pretty bad results in Rviz. Somehow I got the scans to be accumulated on the screen, and the particles were not moving good.
I just mapped on wall of the room for performance and speed purposes. The particles got initialized well, but the center of the robot didn't.
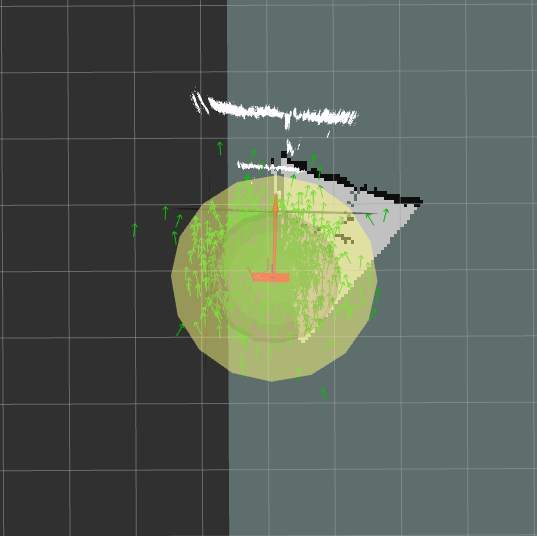
When I moved around the scans got accumulated, not like the turtlebot_navigation tutorial.
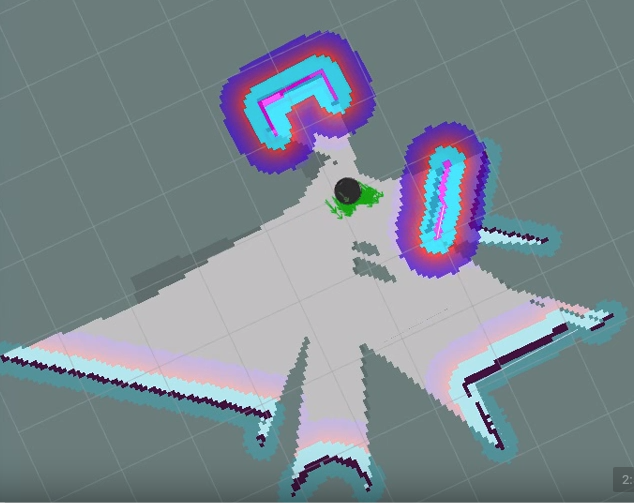
This is something I would expect to have
What I might be doing wrong?

There might be many reasons, could you attach your relevant launch files and configuration files?
Put the files here