
PI Robot upper_base_link not showing in Rviz
Hello all!
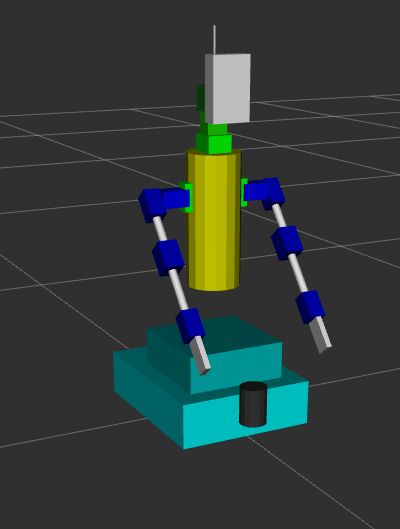
I am having a minor issue in Rviz not displaying a link in Rviz. As you can see in the images the robot seems to be floating but in reality in my URDF files it is connected.

URDF: <robot name="pi_robot">
<!-- * * * Link Definitions * * * -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0425" rpy="0 0 0"/>
<geometry>
<box size="0.32 0.26 0.085"/>
</geometry>
<material name="Cyan1">
<color rgba="0 0.9 0.9 1.0"/>
</material>
</visual>
</link>
<link name="base_laser">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.025" length="0.07"/>
</geometry>
<material name="Black1">
<color rgba="0.2 0.2 0.2 1.0"/>
</material>
</visual>
</link>
<link name="cpu_link">
<visual>
<origin xyz="0 0 0.035" rpy="0 0 0"/>
<geometry>
<box size="0.19 0.19 0.07"/>
</geometry>
<material name="Cyan2">
<color rgba="0 0.7 0.7 1.0"/>
</material>
</visual>
</link>
<link name="upper_base_link">
<visual>
<origin xyz="0 0 0.05" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.085" length="0.10"/>
</geometry>
<material name="Cyan3">
<color rgba="0 0.5 0.5 0"/>
</material>
</visual>
</link>
<link name="torso_link">
<visual>
<origin xyz="0 0 0.12" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.05" length="0.24"/>
</geometry>
<material name="Yellow2">
<color rgba="0.8 0.8 0 1.0"/>
</material>
</visual>
</link>
<link name="head_pan_link">
<visual>
<origin xyz="0 0 0.0225" rpy="0 0 0"/>
<geometry>
<box size="0.05 0.045 0.045"/>
</geometry>
<material name="Green1">
<color rgba="0 1 0 1.0"/>
</material>
</visual>
</link>
<link name="head_tilt_link">
<visual>
<origin xyz="0 0 0.02" rpy="0 0 0"/>
<geometry>
<box size="0.03 0.038 0.04"/>
</geometry>
<material name="Green2">
<color rgba="0.1 0.8 0 1.0"/>
</material>
</visual>
</link>
<link name="neck_link">
<visual>
<origin xyz="0 0 0.021" rpy="0 0 0"/>
<geometry>
<box size="0.03 0.05 0.042"/>
</geometry>
<material name="Green3">
<color rgba="0.1 0.5 0.1 1.0"/>
</material>
</visual>
</link>
<link name="head_link">
<visual>
<origin xyz="0 0 0.025" rpy="0 0 0"/>
<geometry>
<box size="0.03 0.07 0.11"/>
</geometry>
<material name="Grey1">
<color rgba="0.9 0.9 0.9 1.0"/>
</material>
</visual>
</link>
<link name="antenna_link">
<visual>
<origin xyz="0 0 0.035" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.002" length="0.05"/>
</geometry>
<material name="Grey3">
<color rgba="0.8 0.8 0.8 1.0"/>
</material>
</visual>
</link>
<link name="left_shoulder_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.025 0.015 0.05"/>
</geometry>
<material name="Green1">
<color rgba="0 1 0 1.0"/>
</material>
</visual>
</link>
<link name="right_shoulder_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.025 0.015 0.05"/>
</geometry>
<material name="Green1">
<color rgba="0 1 0 1.0 ...

Which element/link do you think should be there?
Should be upper_base_link