
How to make robot_localization work with AR tags
Hi,
We are working on a project and we have big issues using robot_localization to work as a global localizer. We are using ROS Kinetic, Gazebo 7.0, a Kinect camera and ekf_localization_node as filter node. The final goal is get out from the filter absolute robot positions by fusing odometry sensor data and AR codes distance information coming from ar_track_alvar.
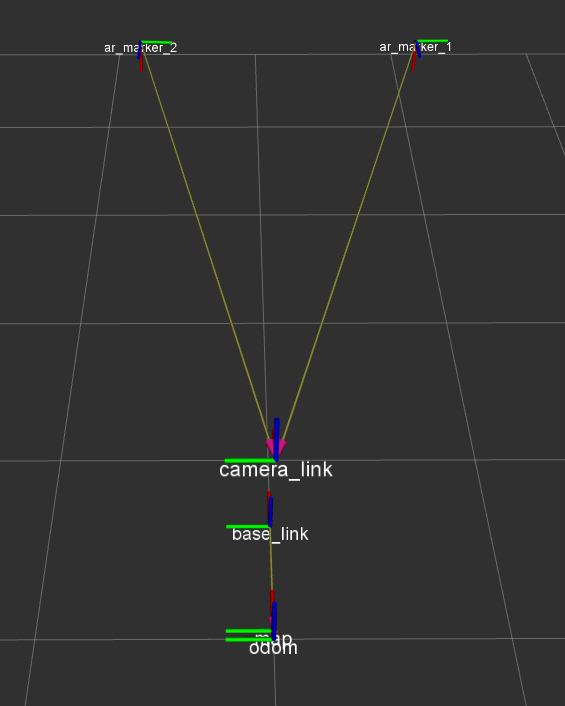
No matter how we feed the filter with marker's data, the map frame just heavily jumps, and as consequence the final robot's pose is erroneous. When no tags are detected, so only feeding Ekf with the odometry, the map frame stays in place, as seen here:
The ekf.param file is seen below:
frequency: 40
sensor_timeout: 1
two_d_mode: true
#transform_time_offset: 0.0
#print_diagnostics: true
debug: false
publish_tf: true
publish_acceleration: false
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_link # Defaults to "base_link" if unspecified
world_frame: map # Defaults to the value of odom_frame if unspecified
dynamic_process_noise_covariance: true
odom0: od
odom0_config: [true, true, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: true
odom0_relative: false
odom0_queue_size: 40
odom0_nodelay: false
odom1: marker1
odom1_config: [true, true, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]
odom1_differential: false
odom1_relative: false
odom1_queue_size: 40
odom1_nodelay: false
process_noise_covariance: [0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.0001]
initial_estimate_covariance: [1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0 ...

Can you post an example of the output from your marker1 topic? It sounds like that is where the problem is.