
Tf tree getting messed up when launching freenect.launch

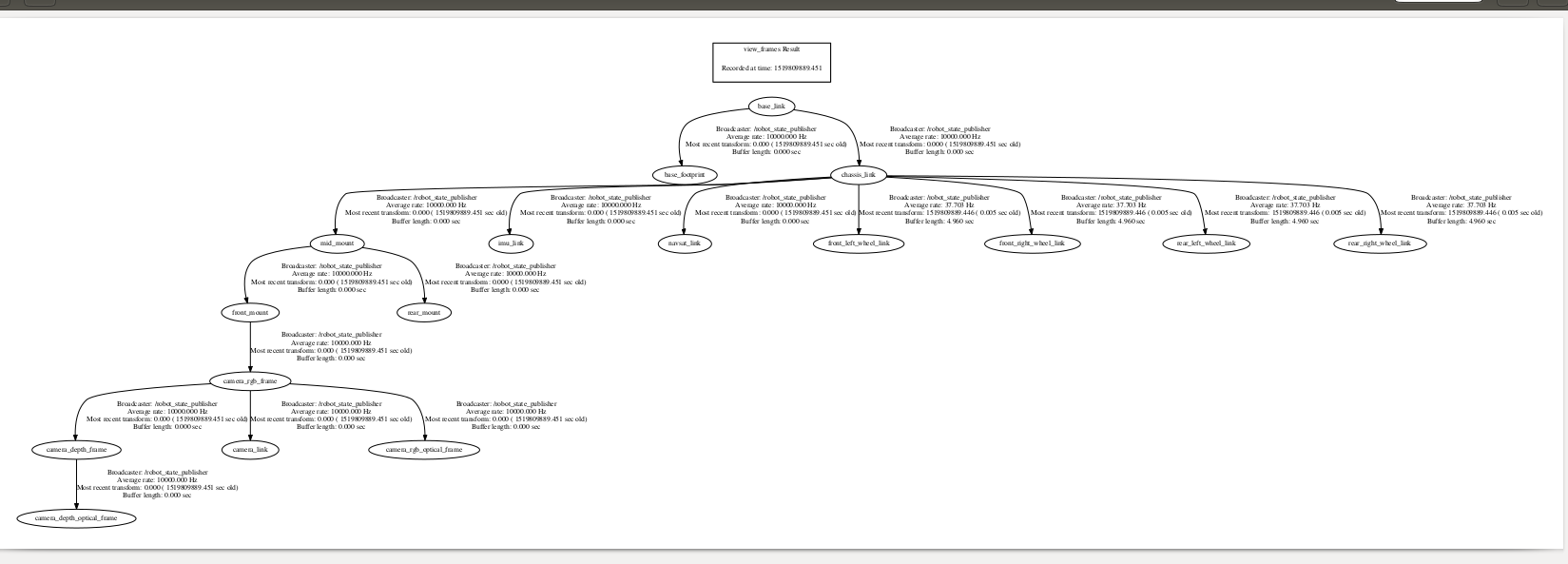
Just launching the robot description .
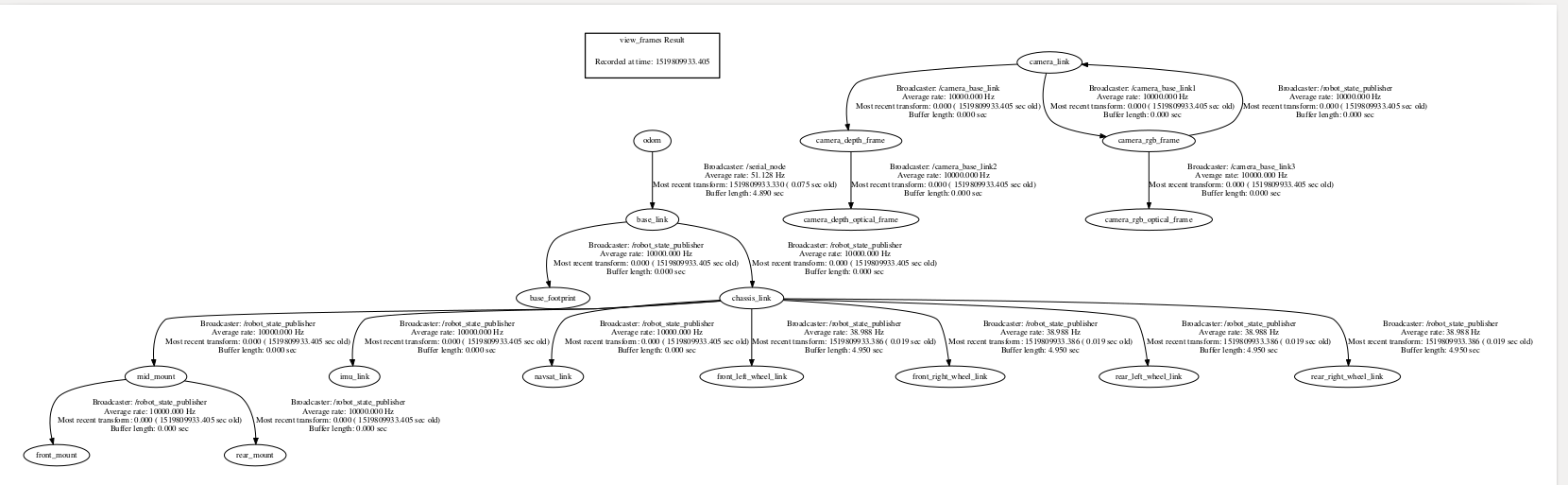
After launching freenect
roslaunch freenect_launch freenect.launch
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Just launching the robot description .
After launching freenect
roslaunch freenect_launch freenect.launch
Your TF tree is not fully connected. You need to publish the transformation between your base_link and camera _link
Had to set the tf on freenect.launch to not publish tf , that was conflicting with my robot tf.
Asked: 2018-02-28 03:58:13 -0500
Seen: 410 times
Last updated: Mar 02 '18
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

The launch file has a "publish_tf" argument, try with this argument set to false
Did the job , thank you! (@humpelstilzchen)
[camera/camera_nodelet_manager-1] process has died [pid 12709, exit code -6, cmd /opt/ros/kinetic/lib/nodelet/nodelet manager __name:=camera_nodelet_manager __log:=/home/ubuntu/.ros/log/eeb501ca-1d10-11e8-875b-00044b65e5df/camera-camera_nodelet_manager-1.log]. log file: /home/ubuntu/.ros/log/eeb501c
Now i am getting the above error , kinect launches and then crashes .
I have tried hooking it upto RPI3 , same error .
I am now using a Nvidia Jetson TX1 , still the same error persists .
Any ideas on how to get around this problem ?
When i am trying to run gmapping , i get the following error .
Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between 'map' and 'base_link' because they are not part of the same tree.Tf has two or more unconnec
Thats a new question, also look at the mentioned log file.