
Left and Right camera according to ROS/OpenCV
HI,
I am currently trying to calibrate 2 cameras (stereo calibration) and tried using this tutorial.
Question: What is the Translation (and Rotation) vector in the output of the calibration ? Is it the transform required to move left camera coordinate system to right ?
What I dont understand: The tutorial mentions left and right camera, but are these left and right wrt to user ? (can be opposite since user is facing the cameras).
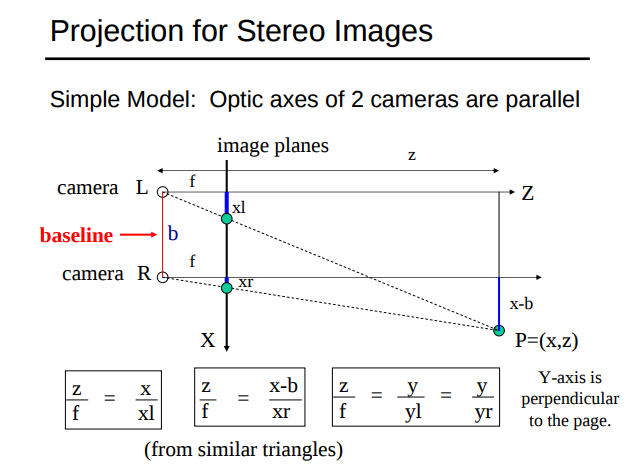
On digging deeper into openCV docs , I came across this image. It clearly suggests that the camera to the right of the user (facing cameras) is the left camera. However my results from stereo calibration dont make sense then. Can someone please explain which is the left camera ??
add a comment

