
Issues with prosilica camera connected through router

I'm testing a Prosilica GT1290C camera with a Pioneer 3AT robot, connected through a router to it. The robot has Ubuntu 14.04 with ROS Indigo and all the packages needed to operate the camera installed. After creating the workspace and the launch file to run the camera, I run the file. Up to this point there are no apparent issues, save for two warnings:
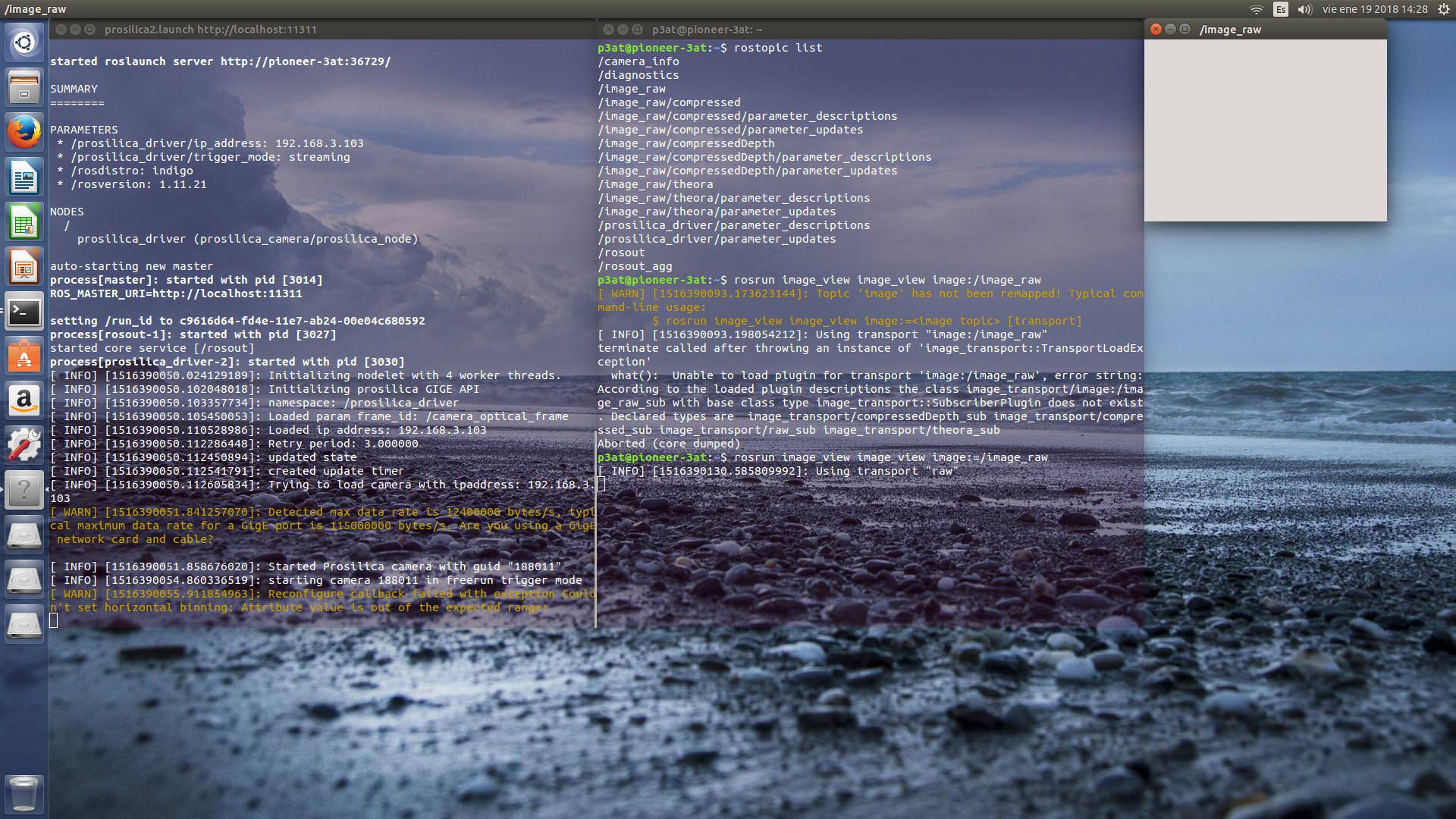
[ WARN] [1516390051.841257070]: Detected max data rate is 12400000 bytes/s, typical maximum data rate for GigE port is 115000000 bytes/s. Are you using a GigE network card and cable?
and
[ WARN] [1516390055.911854963]: Reconfigure callback failed with exception Couldn't set horizontal binning: Attribute value is out of the expected range:
Then I try to see the images with image_view, but all I get is a blank screen:
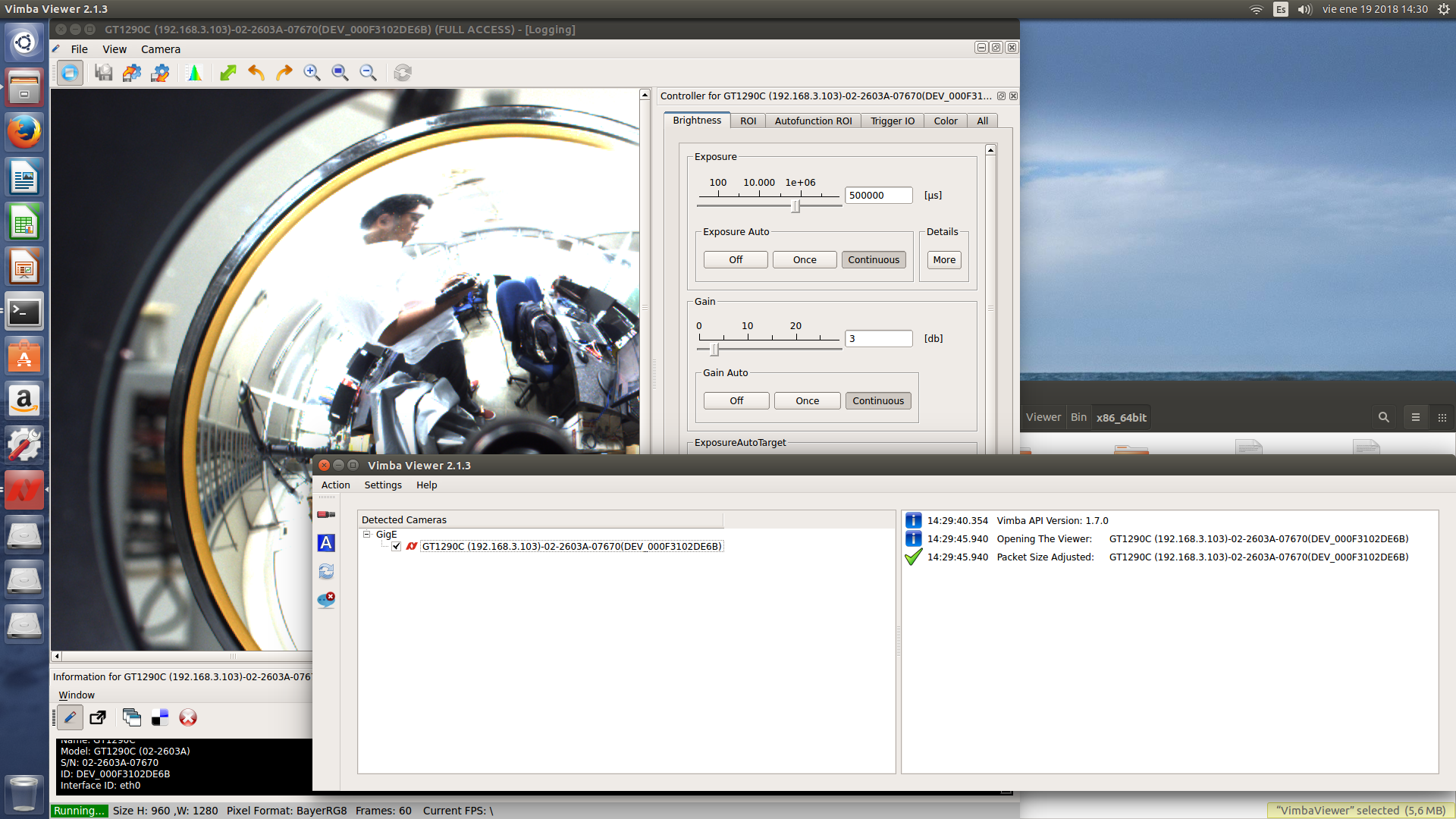
yet with Vimba Viewer it works fine:
Then, I tried connecting the camera directly in the robot and run the exact same launch file (no changes at all) and this happens:
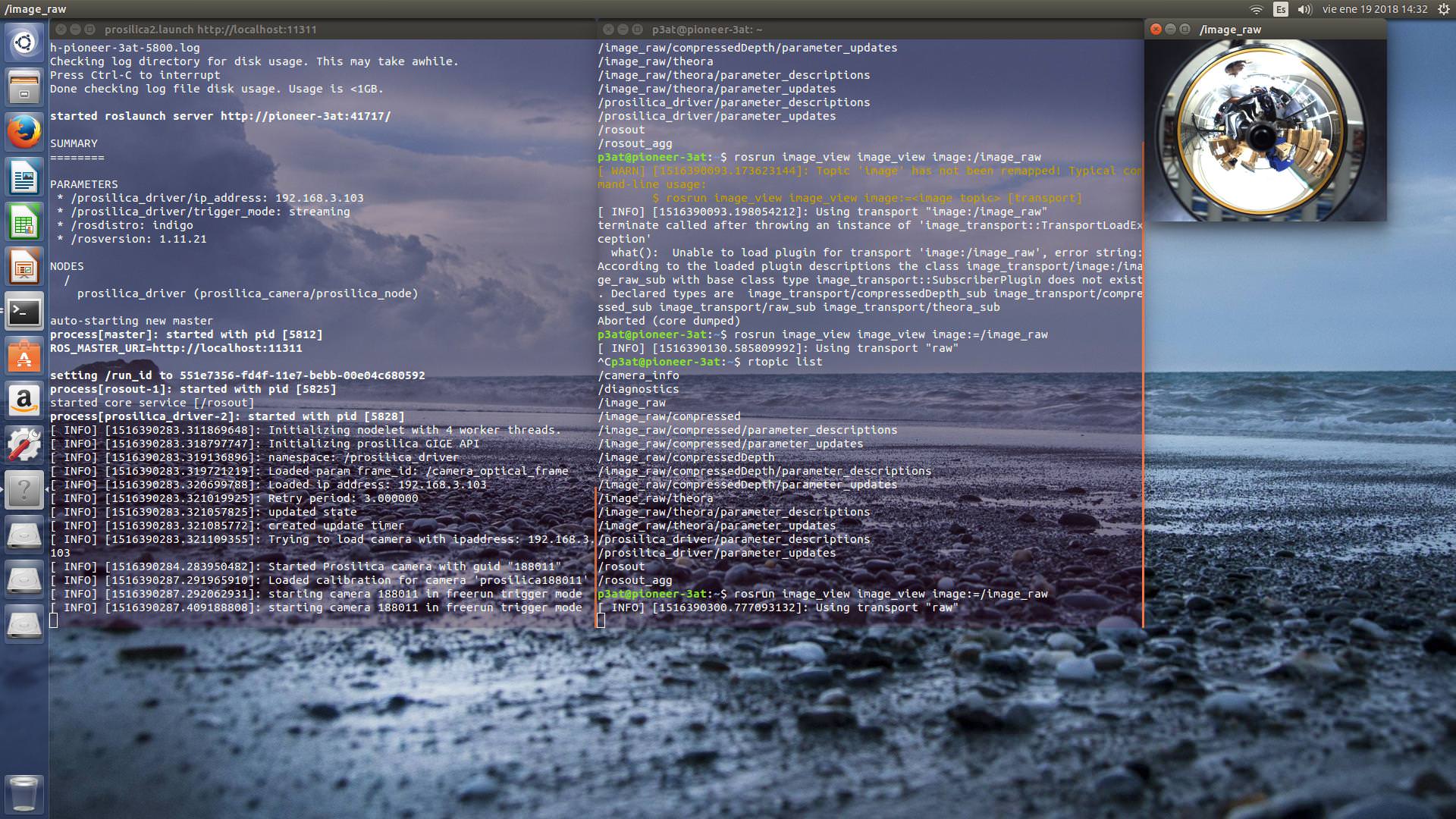
No warnings and image_view can show the images without issue.
Note that the nodes used were those provided with the package prosilica_camera. Any idea why does that happen or what is causing it?
The launch file:
<!--
Starts a PR2 Prosilica camera in streaming mode.
This file exists mainly for backwards compatibility.
-->
<launch>
<node name="prosilica_driver" pkg="prosilica_camera" type="prosilica_node" output="screen">
<param name="ip_address" type="str" value="192.168.3.103"/>
<param name="trigger_mode" type="str" value="streaming"/>
<remap from="camera" to="prosilica" />
</node>
</launch>
