
How to change costmap orientation-z ?
I have changed my map.yaml params.
image: /home/jason/catkin_ws/src/robot_localization/maps/map.pgm
resolution: 0.050000
origin: [-110, 11, -1.57]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.19
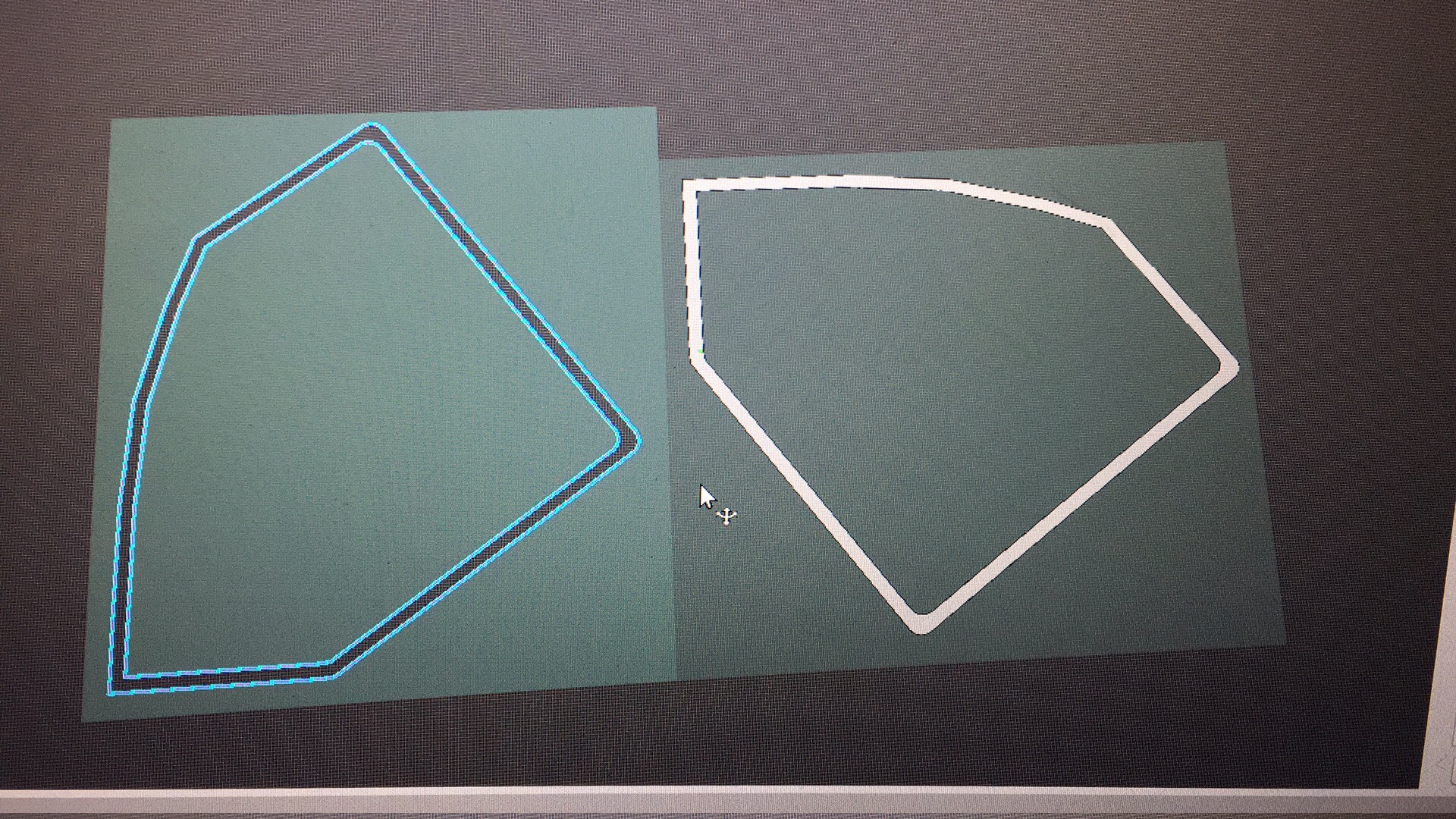
the orientation is -1.57.
but when I load global costmap
my global costmap params:
obstacle_range: 2.5
raytrace_range: 3.5
footprint: [[-0.5, -0.5], [-0.5, 0.5], [0.5, 0.5], [0.5, -0.5]]
#robot_radius: 0.105
cost_scaling_factor: 0.5
map_type: costmap
transform_tolerance: 0.2
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 2.0
publish_frequency: 0.1
static_map: true
transform_tolerance: 1.0
plugins:
- {name: static_map, type: "costmap_2d::StaticLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
inflation_layer:
inflation_radius: 0.65
add a comment
