
robot_localization IMU coordinate frame.
My question is: When using the robot_localization package, should the IMU chirality obey the standard right hand rule, or left hand rule? I think there is a discrepancy in the docs.
From the docs of the robot_localization package a section about IMU data states the following:
- Adherence to specifications: As with odometry, be sure your data adheres to REP-103 and the sensor_msgs/Imu specification.
Acceleration: Be careful with acceleration data. The state estimation nodes in robot_localization assume that an IMU that is placed in its neutral right-side-up position on a flat surface will:
- Measure +9.81 meters per second squared for the Z axis.
- If the sensor is rolled +90 degrees (left side up), the acceleration should be +9.81 meters per second squared for the Y axis.
- If the sensor is pitched +90 degrees (front side down), it should read -9.81 meters per second squared for the X axis.
Problem: this documentation says two things. It says the data should adhere to REP-103, which says "All systems are right handed. This means they comply with the right hand rule.". Then it describes an example that could only work on a left hand system. Am I missing something?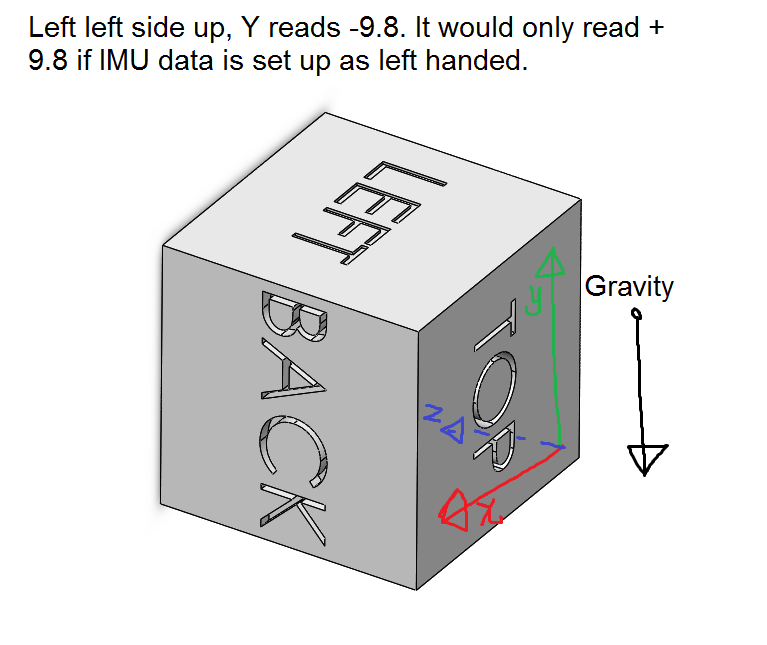
add a comment

