Why does the navfn plan a path through a wall
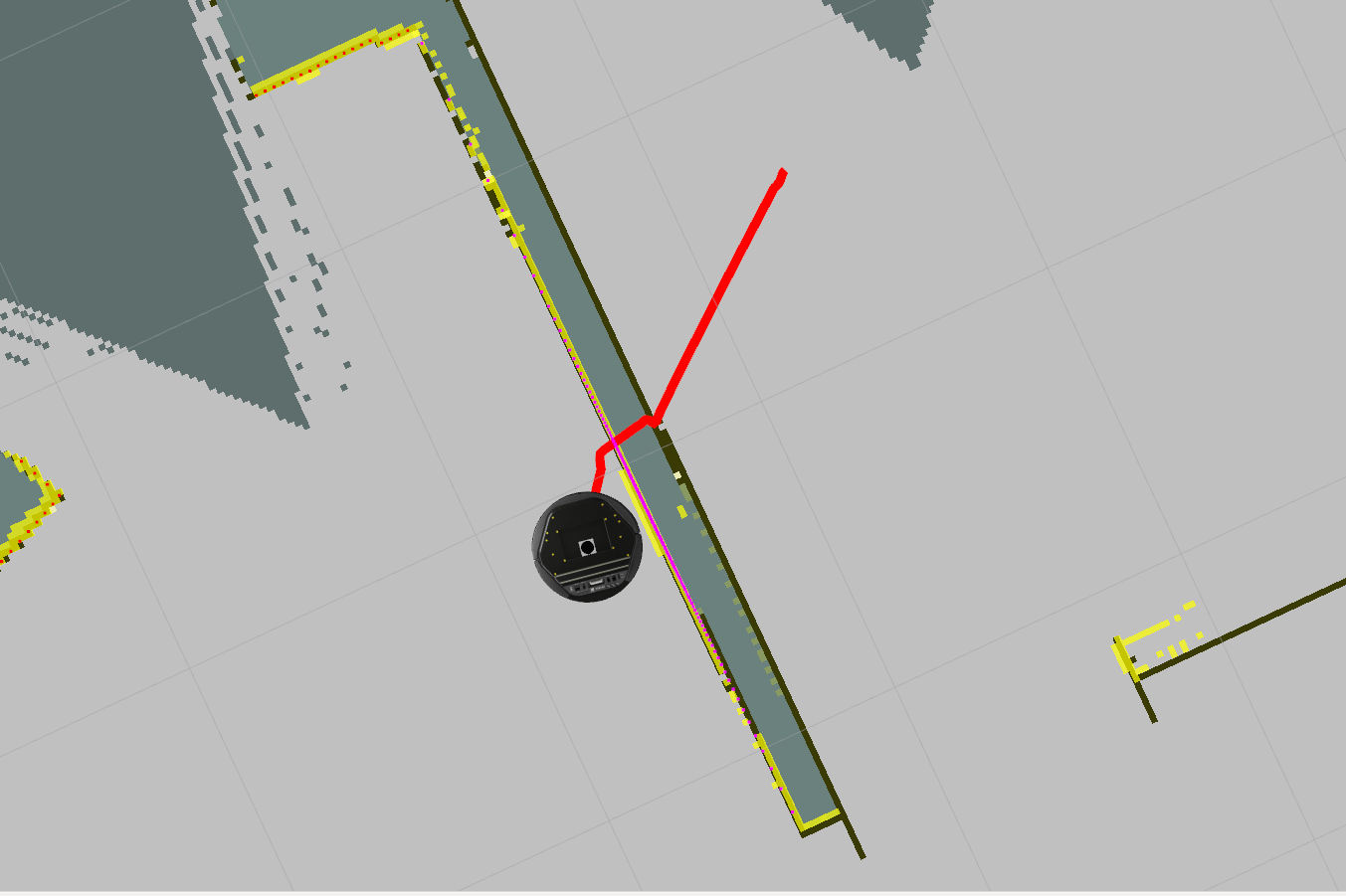
Hi,all, we are using navfn in move_base to plan a global path for a robot. For now, the experiments are being done in a simulated environment by gazebo. However, we found that if the robot is close to a wall, if a goal is on the another side of the wall, the generated path from navfn often goes through the wall. Please see the below two images.
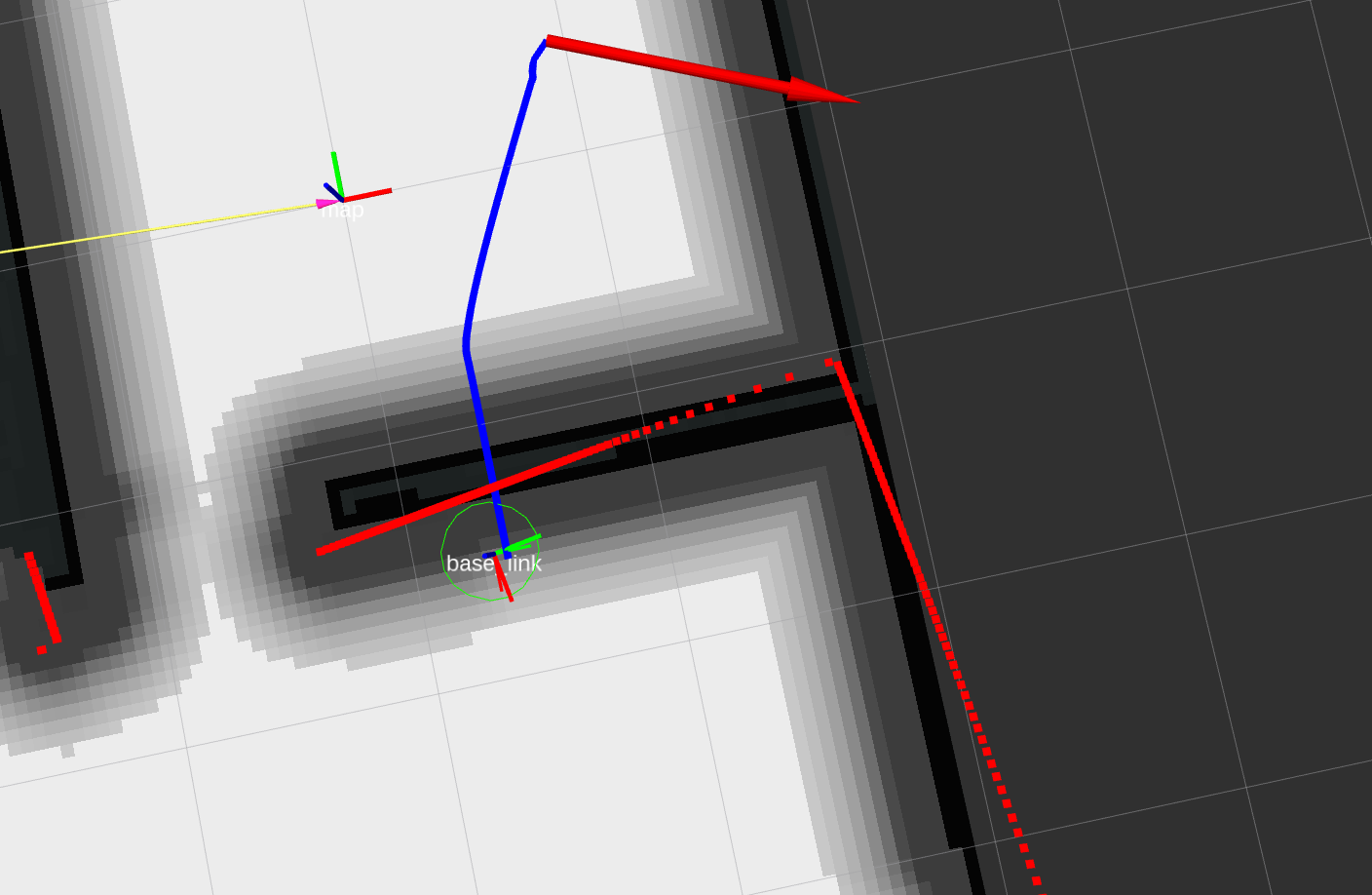
The first image shows the generated path when the inflation layer is canceled. The second image shows the generated path with a running inflation layer. Both of these two path go through the wall.
I have read a similiar question here. But the walls in the illustrated instance are intermittent(not constantly). On the contrary, as you can see from the below images, the walls are constantly(unintermittent).
Is this a bug of navfun? Looking forwards to any advices to improve navfn! Thanks!