
robot_localization NaN output
Hi all, When I execute the robot_localization with the differential mode for odometry data, I received nan value in the /odometry/filtered topic. When I turn on debug mode, I see the following texts. Could you please guide me how to start debugging?
Previous message time was 1507875840.235904932, current message time is 1507875840.269231081, delta is 0.03332614898681640625, velocity is (vX, vY, vZ): (0, 0, 0)
(vRoll, vPitch, vYaw): (0, -0, 0)
Previous measurement covariance:
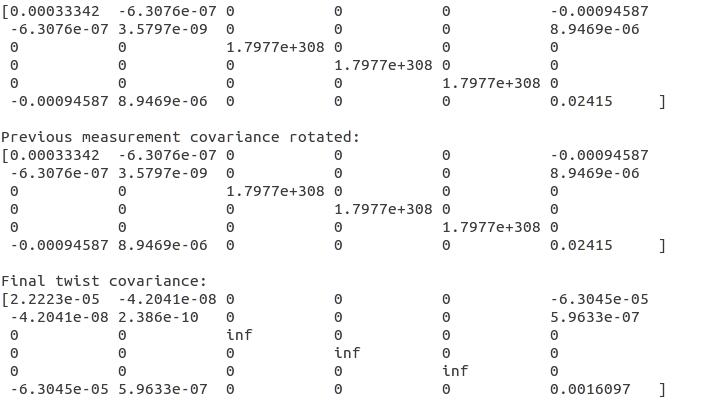

Transformed covariance is
[-nan -nan -nan -nan -nan -nan
-nan -nan -nan -nan -nan -nan
-nan -nan -nan -nan -nan -nan
-nan -nan -nan -nan -nan -nan
-nan -nan -nan -nan -nan -nan
-nan -nan -nan -nan -nan -nan ]

