
How to build a 3D model in RViz using data from a Sick LMS200?

Hello. I have Sick LMS200 30106 (sitting on top of a servo) and it is connected to my PC via RS422 to USB. Here is what it looks like:
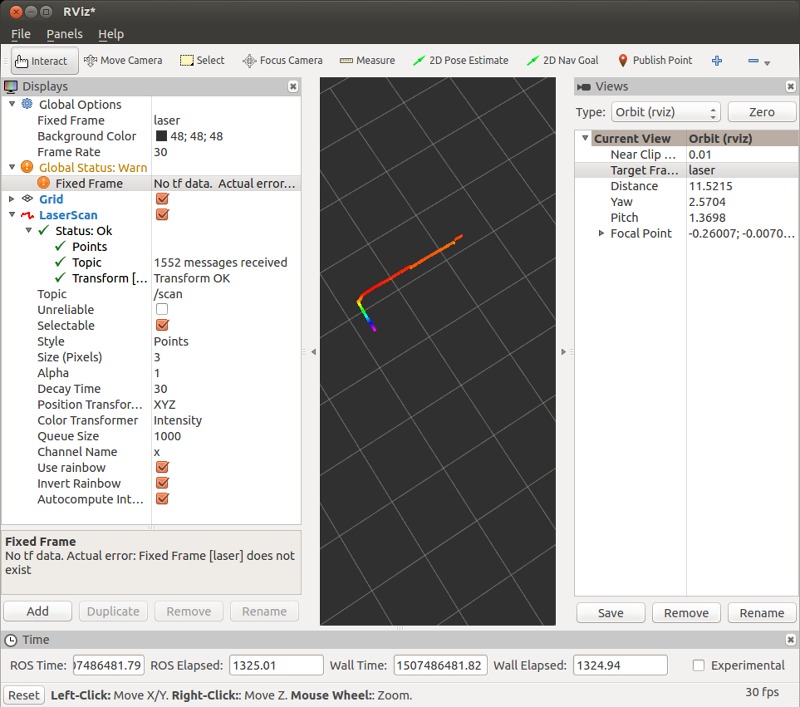
I am using Ubuntu 14.04 with ROS indigo. I am using the sicktoolbox_wrapper package to pass the scan data to RViz (via the /scan topic). I am able to see a single scan line at a time in RViz:
I am trying to create a 3D model like this gentleman: https://www.youtube.com/watch?v=-Tpqw... . In the comments he alludes to a SickLms package, but I have not been able to find it in the ROS packages in the software section. I played a bunch with all the settings in the LaserScan type in RViz, and read http://wiki.ros.org/rviz/DisplayTypes... , and I could not figure out how to make the data appear in 3D. I also searched all over the web, but could not find any instructions on how to achieve this objective (except this - http://library.isr.ist.utl.pt/docs/ro... , but it is too complex for me to understand if this is what I need to pursue).
I am new to ROS, and from what I saw online I am not the first person who is very new to ROS to seek this objective. Could you please provide some guidance on how to do this? Does a package exist for this purpose? And if not, which packages do I need to learn to achieve my objective?
Thanks in advance!

