
rviz doesn't show any shape
Hi all, I'm trying to build my first URDF model, following this tutorial: http://wiki.ros.org/urdf/Tutorials/Bu...
Booth replicating what's done there, and cloning this repo too, I can't see any mash or shape in rviz, only transformations; here's what I see from chap.4 code:
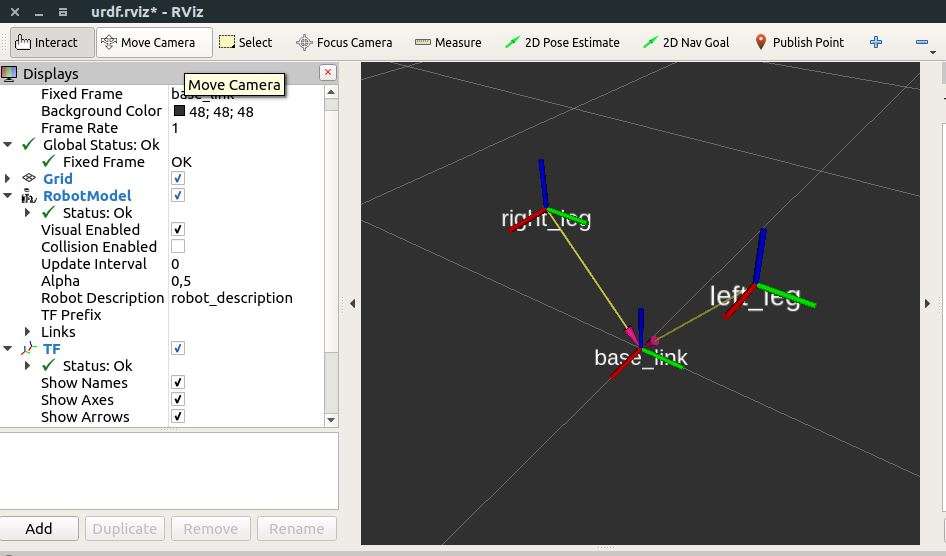
There should be cylinders and squares...
Anyone experiencing this issue? I'm running ROS Lunar, Ubuntu 17.04 x64 on VirtualBox (with "3D acceleration" disabled because i don't know why, if it's enabled rviz trows segmentation faults at start)
Side note: chap.1 I think it's buggy because with no joints there's not any "base_link" transformation supplied by joint_state_publisher, and Rviz go crazy...


We're probably going to have to see what the contents of your URDF is.
I went further and complete the model, the result is an exact copy of this. In rviz I still don't see any shape, but launching the same file in Gazebo produce a correct visualisation of the entire robot.
This could be caused by locale settings. See ros-visualization/rviz#1151.