
Octomap in moveit
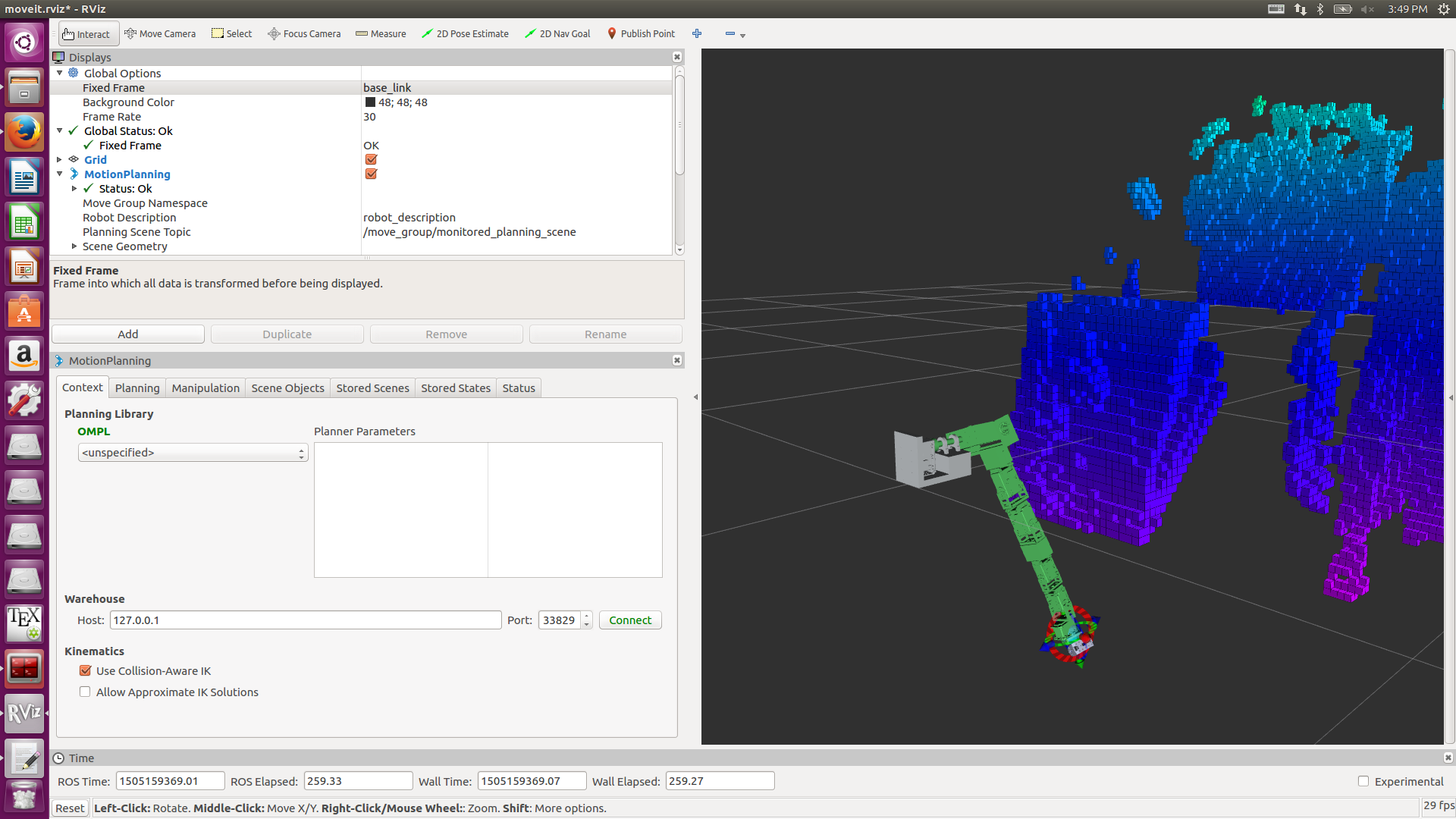
I already can see octomap in rviz but the problem is the octomap is quite different from the real world kinect sees. I don't know why. Do I need to adjust any parameter for configuration file?
Besides, the refresh rate is quite low. Anybody know how to change refresh rate of octomap?
Thanks for any suggestion.

add a comment

