
Second Rviz instance doesn't show robot model from ROS master
Dear all,
I am running a ROS master on a first PC with a Universal Robot in it. In a second PC I'd just like to see the visualization with Rviz. After exporting the IP address of the master using
export ROS_MASTER_URI=myipadress
The second PC connects to the first one, but I am having trouble to see the robot in the second PC. After adding the robot model in second PC I just get errors in the robot model. It is just shown in a weird position and is coloured white.
Link to screenshot 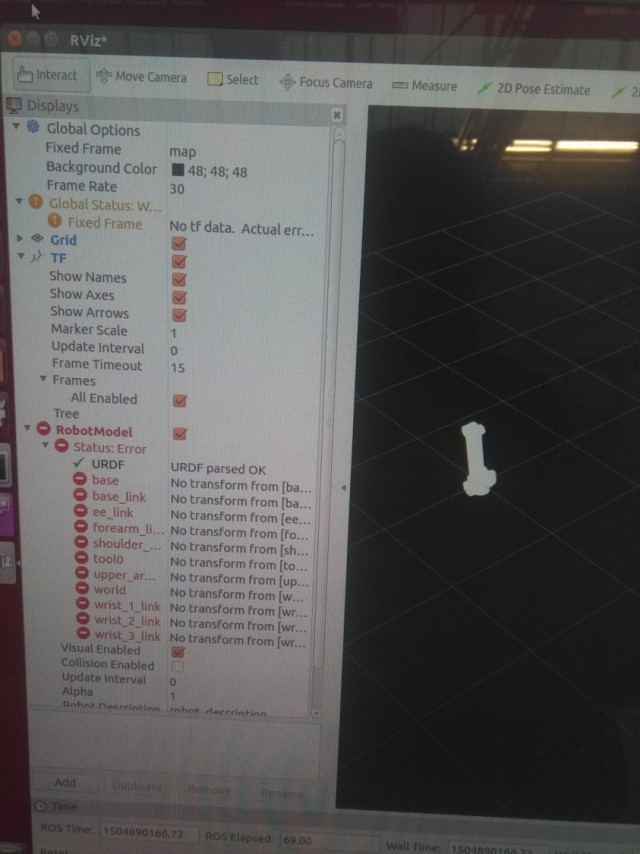
Sorry for the screenshot picture with my phone, but the PC is right now not connected to the internet anymore, so I couldn't post from there. Image upload native here in ROS answers is not yet available for me. Sorry again.
Did I forget an important step before connectiong or what went wrong here?
Edit/Update:
ROSLISP_PACKAGE_DIRECTORIES=""
ROS_DISTRO="indigo"
ROS_ETC_DIR="/opt/ros/indigo/etc/ros"
ROS_MASTER_URI="160.69.69.100"
ROS_PACKAGE_PATH="/opt/ros/indigo/share:/opt/ros/indigo/stacks"
ROS_ROOT="/opt/ros/indigo/share/ros"

@matl: please attach the screenshot to your question directly. I've given you enough karma for that.
Please update your question with the values of
ROS_IP,ROS_HOSTNAMEandROS_MASTER_URIfor each of the involved computers. A simple diagram showing your network layout and configuration would also help.Most likely you don't have a working DNS, and should set
ROS_IPon all hosts.Without the other requested information we cannot help you.
My best guess is that the second machine does not know where to look for the models of the robot you are trying to load.
On the second PC do you have the Universal Robot package installed or are you using it from source?
The second machine can't subscribe to the
/tftopic properly, that is most likely the problem. The 'white' meshes and 'bunched up' view are typical symptoms of that. that's why there is a request for theROS_IP,ROS_HOSTNAMEandROS_MASTER_URIon all involved hosts.I updated the values above