
Laser filters limit scan angle opposite way and hector mapping limit of scan range [closed]

Hi guys,
As pointed in the wiki and here I have used the pacakge laser_filters with the function LaserScanAngularBoundsFilter to eliminate some points. However the filter acts on the opposite way I would like to.
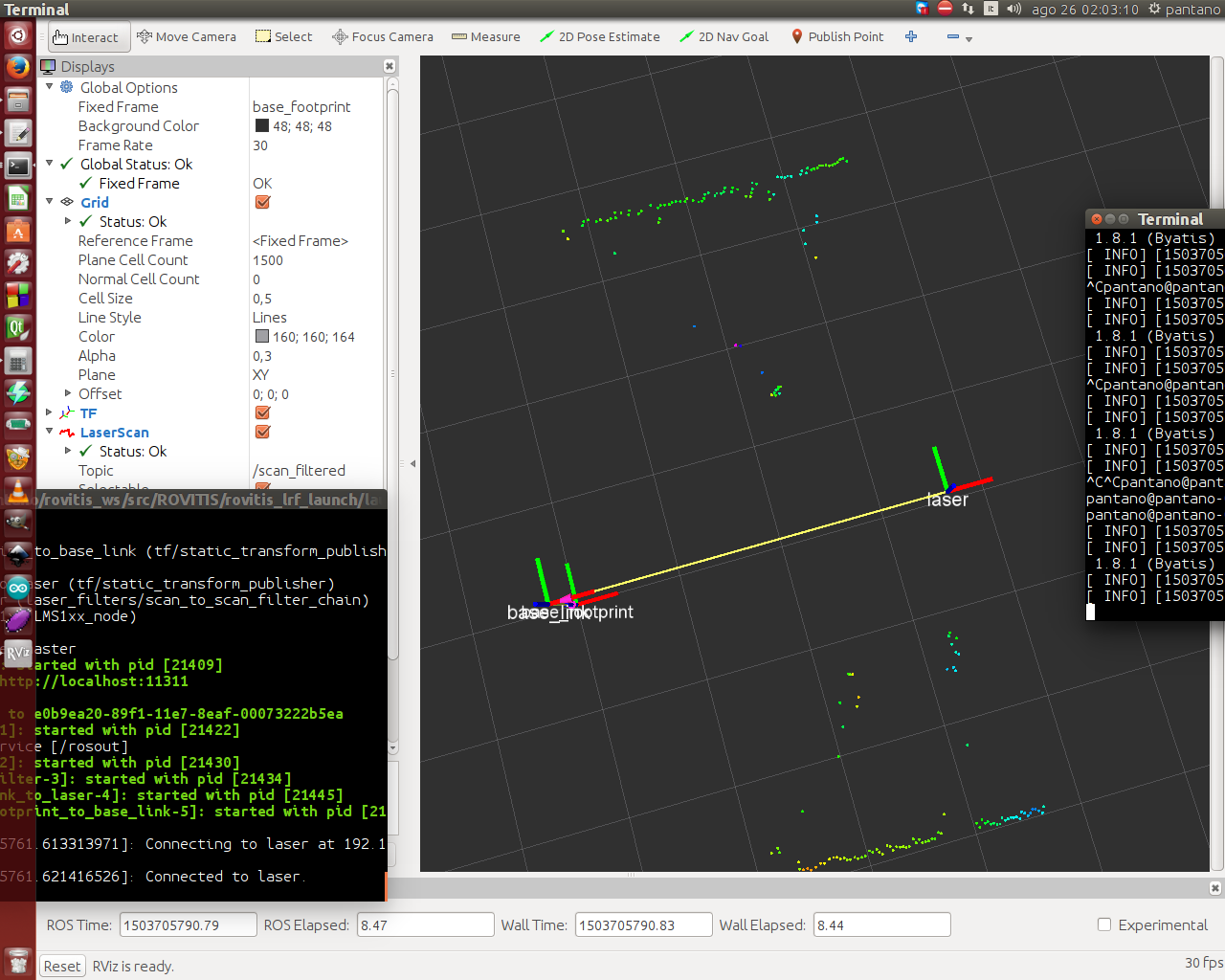
As in the photo attached it ispossible to see that the points eliminated are the one on the front and not on the back. So the screenshot have the points I would like to remove. At the beginning I thought, ok easy, just change the sign of the upper and lower bound. But, seems that laser filter does not work if lower bound is bigger that upper bound.
Any hints guys?
For clarity, here the actual .yaml of the image above:
scan_filter_chain:
- name: range
type: LaserScanAngularBoundsFilter
params:
lower_angle: -1.57
upper_angle: 1.57
Closed for the following reason
the question is answered, right answer was accepted by
matteopantano
close date 2018-03-06 15:47:16.132713
add a comment

