
Anybody know what might be causing my laser readings to behave like this? [video] [closed]
In the video I move the robot, and the laser readings seem to move along with the robot, when in fact they should be more stationary. I then increase the delay on the /scan topic, and I get a really thick wall, in the direction in which the robot is moving.
Any idea what might cause it? It seems that algorithms like gmapping are producing a pretty decent map.
I did a tf view_frame, and the tf's are all publishing at about 5hz, the robot is defined in a urdf.
Thank you in advance!
Here is the tf_view file, the laser scan comes from veldyne: 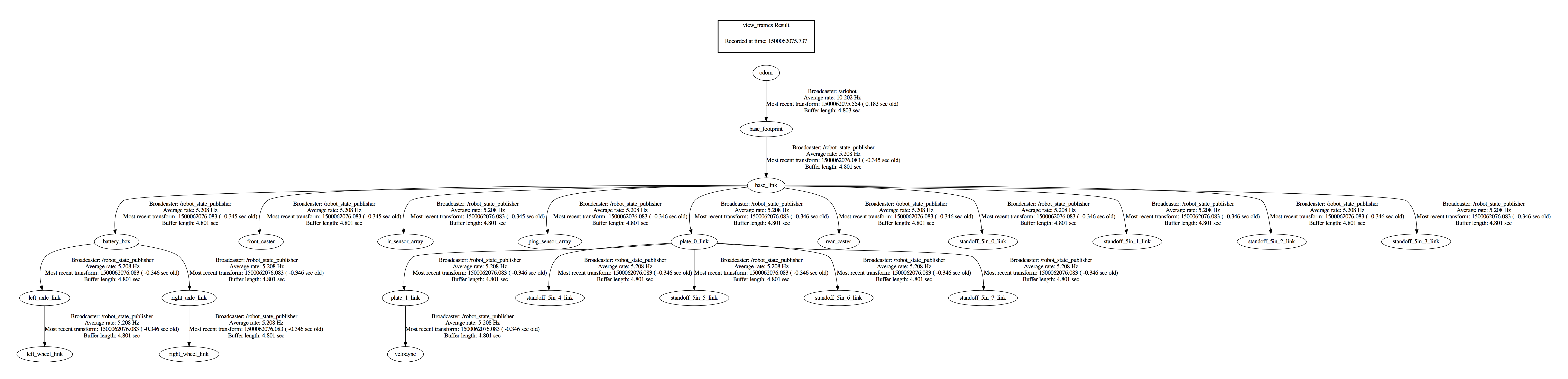


Could you post the view_frames.py output?
Ive updated the original post with the view frames output