
code error when trying to publish an JointTrajectory message
Hi!
Right now i am working with a custom robot and i am trying to publish a message by cpp. Which it doesn't work for some reason. The points and joint names i send are correct, (tested publishing via terminal) and i run rostopic info /topic_name and it says that my node is associated with the topic via publisher. But i dont understand why it doesnt work.
Can anyone help?
here is the code:
int main(int argc, char **argv)
{
ros::init(argc, argv, "trajectory_test_node");
ros::NodeHandle nh;
ros::Publisher r_arm_comand_publisher = nh.advertise<trajectory_msgs::JointTrajectory>("/signbot/r_arm_controller/command", 1000);
// Create a JointTrajectory with all positions set to zero, and command the arm.
if(ros::ok())
{
// Create a message to send.
trajectory_msgs::JointTrajectory msg;
// Fill the names of the joints to be controlled.
msg.joint_names.clear();
msg.joint_names.push_back("r_shoulder_joint");
msg.joint_names.push_back("r_top_arm_joint");
msg.joint_names.push_back("r_elbow_joint");
msg.joint_names.push_back("r_wrist_joint");
// Create one point in the trajectory.
msg.points.resize(1);
// Resize the vector to the same length as the joint names.
// Values are initialized to 0.
msg.points[0].positions.resize(msg.joint_names.size(), 1.0);
// How long to take getting to the point (floating point seconds).
msg.points[0].time_from_start = ros::Duration(0.001);
ROS_INFO_STREAM ("Sending command:\n" << msg);
r_arm_comand_publisher.publish(msg);
ros::spinOnce();
ros::Duration(3).sleep();
}
ROS_INFO_STREAM("***** SHUTTING DOWN ********\n");
return 0;
}
here's pictures of rqt_graph when i run my node 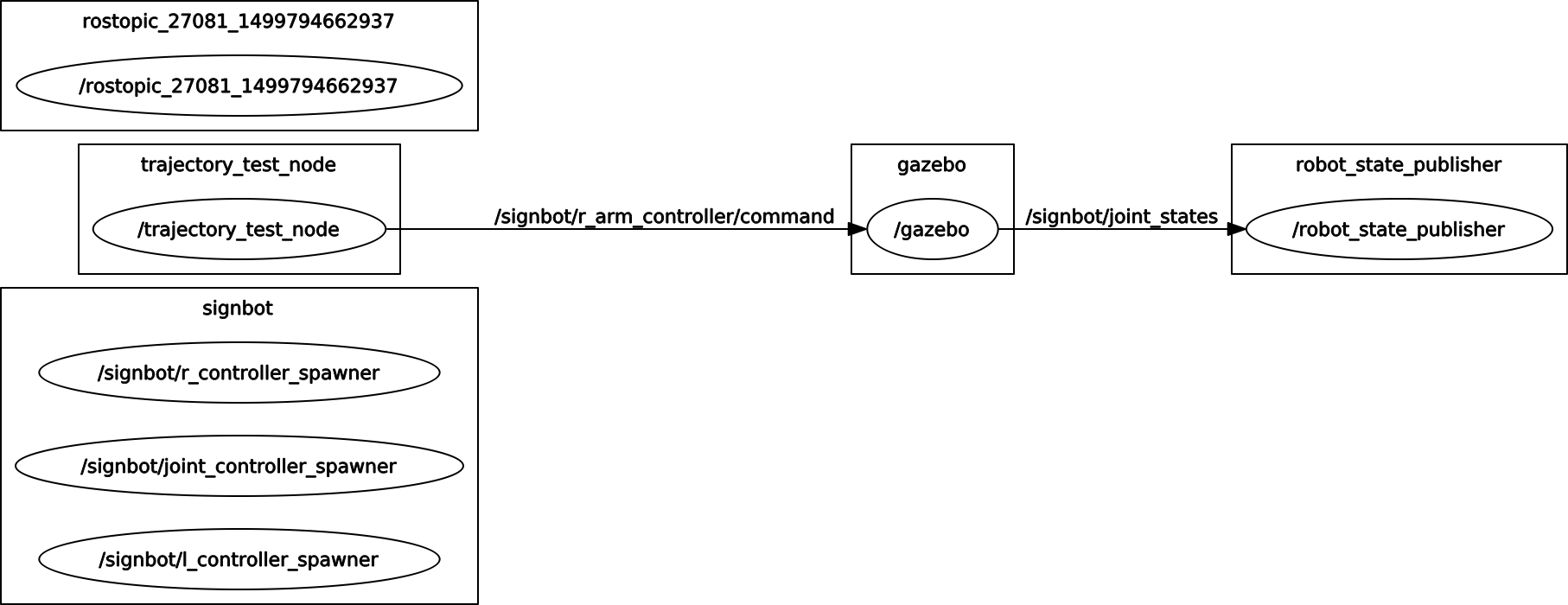
and here's a picture of rqt_graph when i plushing via terminal 
add a comment
