
moveit planning collision avoidance
Hello there,
I am trying to create a ROS based application in which i use a Joystick to control the robot, then save the robot state and later create plans from those saved positions.
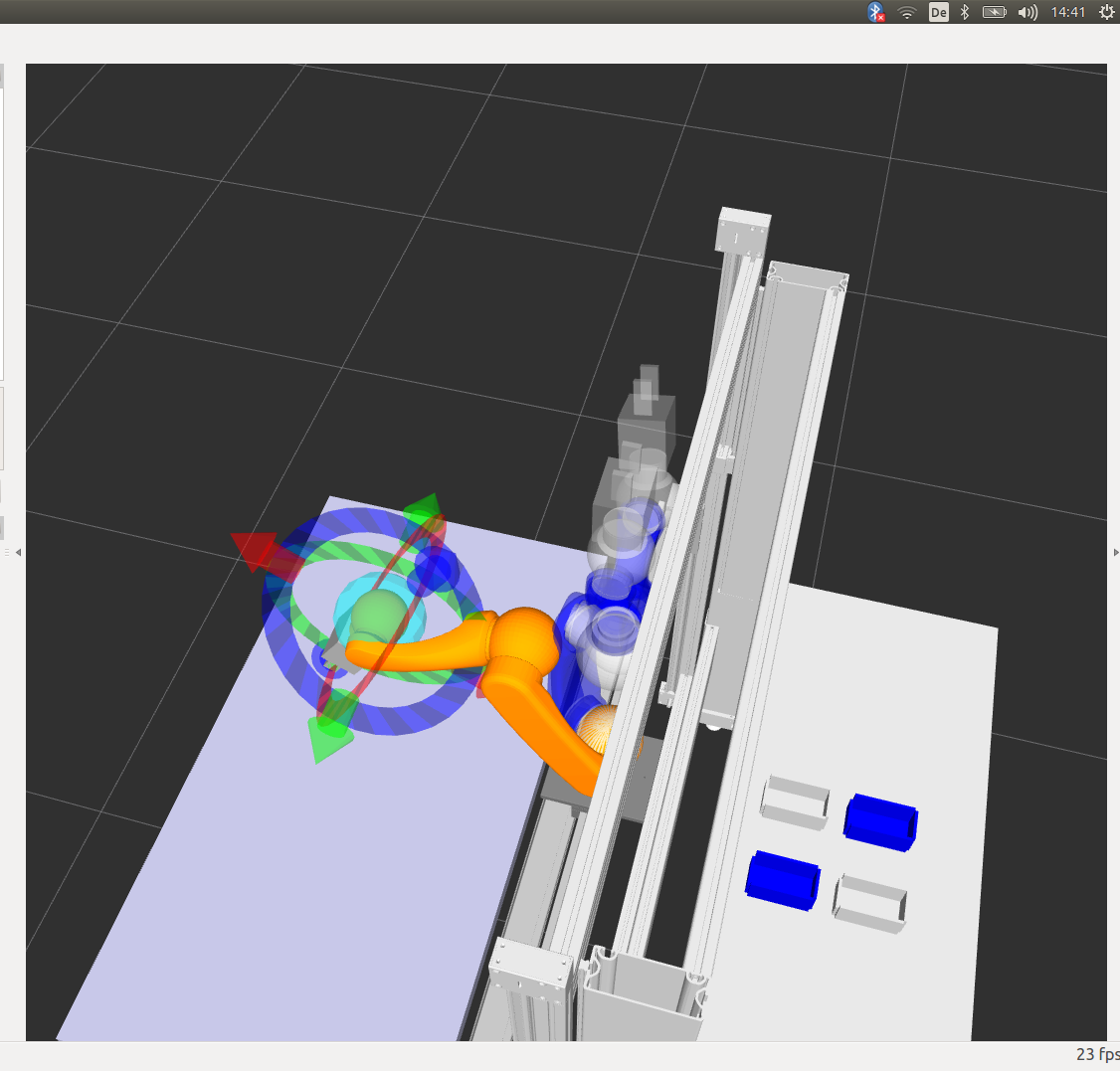
However i am encountering several bugs when planning Trajectories with moveit. One of which is shown in the following Screenshot. It shows the start State (not touching the frame), the state which is somewhere in the Trajectory and touches the frame, and the goal state. As you can see, there must clearly be a valid path!
Or am i mistaken and the obvious path is only obvious to humans, but not to a IK-Solver?
Other times, i try to make a path from let's say the robot being in some configuration under the table to somewhere above the table (without moving the robots base_link), but the plan is invalid and the robot dances around... which is fun to watch, but unacceptable for the application.
The Trajectory is of course not excecutet, and moveit points out, that the path might just not be valid due to postprocessing. So might that be the cause of my problem?
So much to my problem... now to my "long-story-short-question":
Is it possible to configure moveit in such a way that it is aware of objects in the Scene and gives me a valid path for over 90% of the requests?
