
Orienting AMCL Map/Global_Costmap
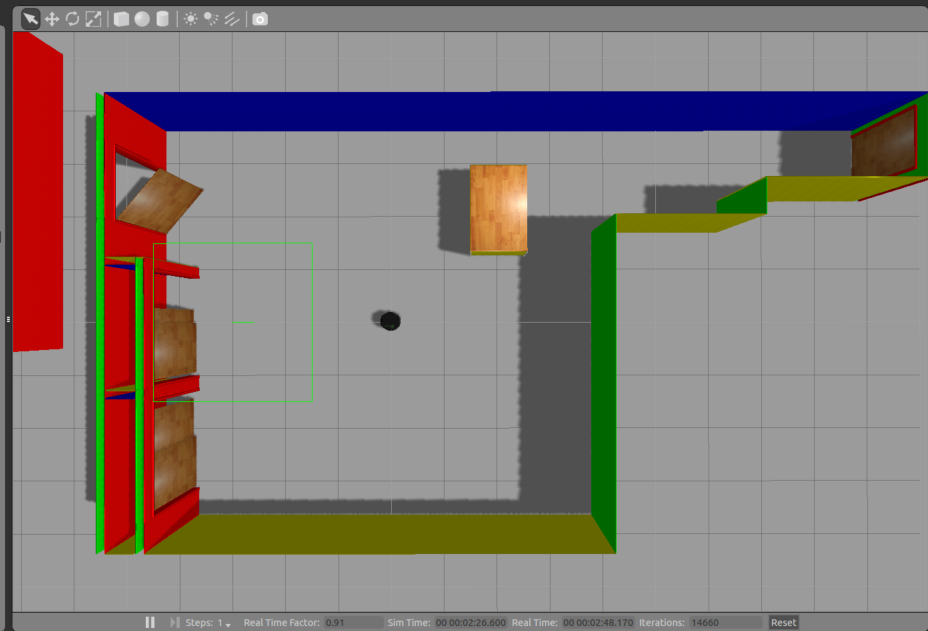
I'm running AMCL navigation on a map I created with the "Autonomous Navigation of a Known Map with Turtlebot" tutorial. As you can see below, when I open RViz with "roslaunch turtlebot_rviz_launchers view_navigation.launch", the robot (the little black dot) is not centered in the middle of the map, and I think it has to do with the map's origin, set in the .yaml file.
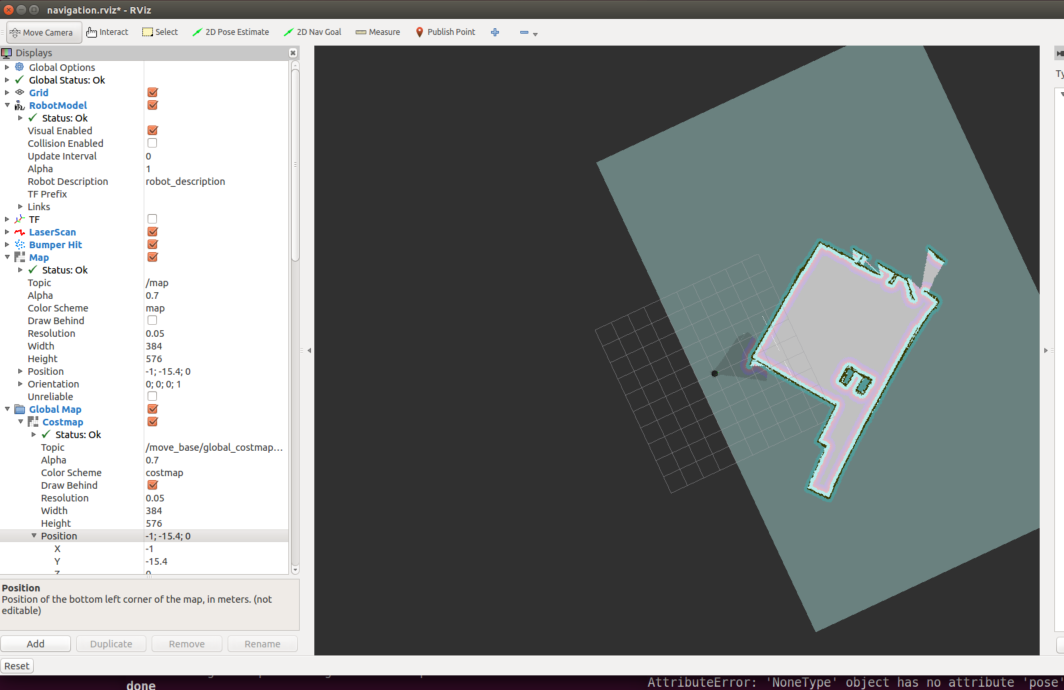
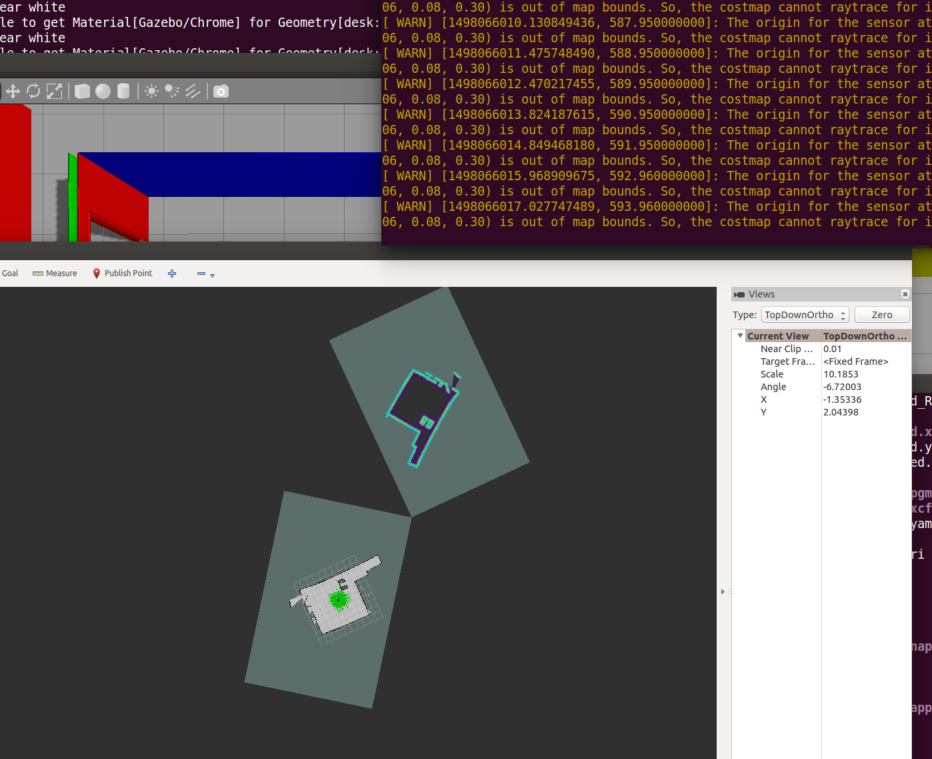
I can reconfigure the origin of the .yaml file to fix the robot's position on the RViz visualization of the map (see the correction in the 3rd picture), but the origin of my Global_costmap hasn't been updated, which means the laserscans aren't aligned with the rest of the map.
Any ideas of what I'm doing wrong?


I realized the global_costmap is somehow getting its Position (x, y) and Orientation set somehow...I just can't figure out what's setting it to my map's original origin and why it's not getting the update when I change the map's origin.