
create a nodelet launch file
I have managed to build a nodelet (tegra_stereo) and it is detected when I run "rospack plugins --attrib=plugin nodelet"
image_view /home/ashwath/catkin_ws/src/image_pipeline/image_view/nodelet_plugins.xml
image_proc /home/ashwath/catkin_ws/src/image_pipeline/image_proc/nodelet_plugins.xml
image_rotate /home/ashwath/catkin_ws/src/image_pipeline/image_rotate/nodelet_plugins.xml
image_publisher /home/ashwath/catkin_ws/src/image_pipeline/image_publisher/nodelet_plugins.xml
stereo_image_proc /home/ashwath/catkin_ws/src/image_pipeline/stereo_image_proc/nodelet_plugins.xml
depth_image_proc /home/ashwath/catkin_ws/src/image_pipeline/depth_image_proc/nodelet_plugins.xml
tegra_stereo /home/ashwath/catkin_ws/src/tegra_stereo/nodelet_plugins.xml
pointgrey_camera_driver/home/ashwath/catkin_ws/src/pointgrey_camera_driver/pointgrey_camera_driver/nodelet_plugins.xml
I want to run the nodelet. I couldn't find any helpful tutorial to do that. How do I start the nodelet? Or how to call the nodelet on another ros program?
Update 2 I could launch the nodelet using the following launch file.
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager"/>
<node pkg="nodelet" type="nodelet" name="tegra" args="load tegra_stereo/tegra_stereo_proc
standalone_nodelet" output="screen">
</node>
</launch>
This is what I get on rqt_graph
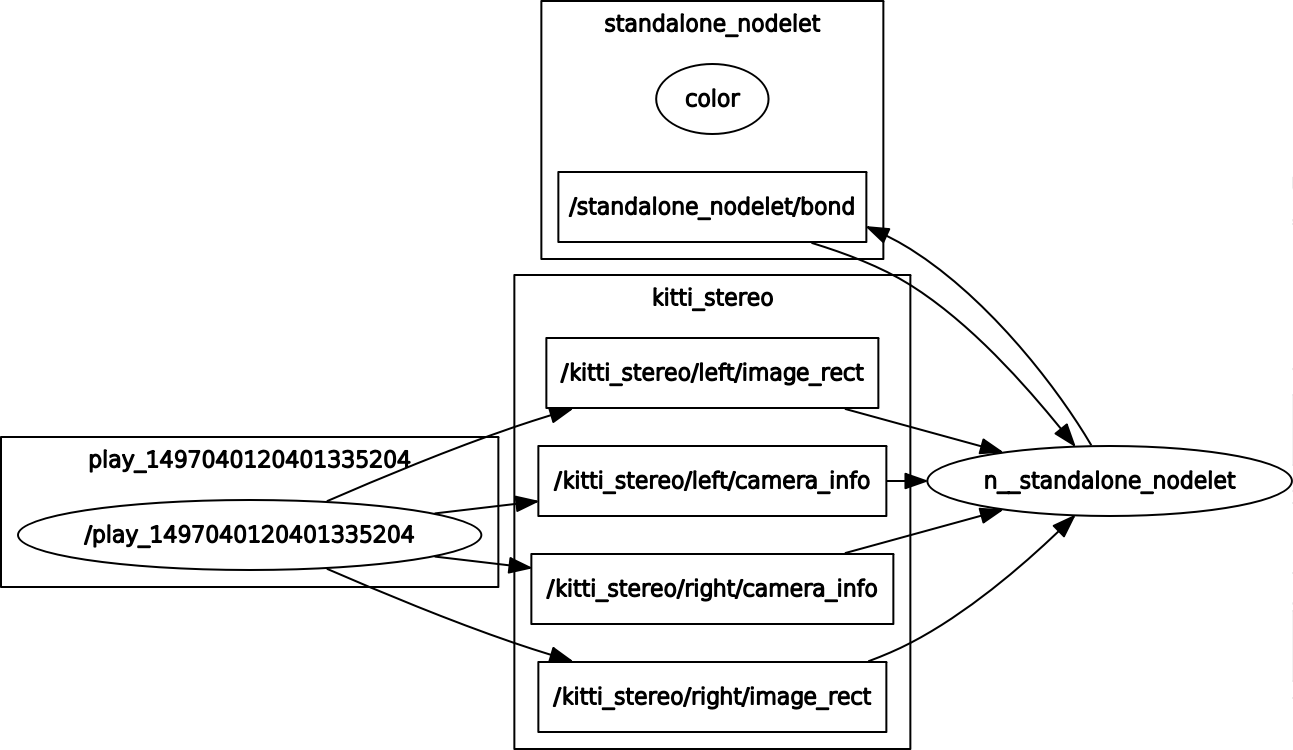 standalone_nodelet doesn't connect to tegra_stereo
standalone_nodelet doesn't connect to tegra_stereo
This is on my rostopic list
/clock
/kitti_stereo/left/camera_info
/kitti_stereo/left/image_rect
/kitti_stereo/right/camera_info
/kitti_stereo/right/image_rect
/rosout
/rosout_agg
/standalone_nodelet/bond
/statistics
/stereo/cam0/image_rect
/stereo/cam0/image_rect/compressed
/stereo/cam0/image_rect/compressed/parameter_descriptions
/stereo/cam0/image_rect/compressed/parameter_updates
/stereo/cam0/image_rect/compressedDepth
/stereo/cam0/image_rect/compressedDepth/parameter_descriptions
/stereo/cam0/image_rect/compressedDepth/parameter_updates
/stereo/cam0/image_rect/theora
/stereo/cam0/image_rect/theora/parameter_descriptions
/stereo/cam0/image_rect/theora/parameter_updates
/stereo/cam1/image_rect
/stereo/cam1/image_rect/compressed
/stereo/cam1/image_rect/compressed/parameter_descriptions
/stereo/cam1/image_rect/compressed/parameter_updates /stereo/cam1/image_rect/compressedDepth /stereo/cam1/image_rect/compressedDepth/parameter_descriptions /stereo/cam1/image_rect/compressedDepth/parameter_updates /stereo/cam1/image_rect/theora /stereo/cam1/image_rect/theora/parameter_descriptions /stereo/cam1/image_rect/theora/parameter_updates /stereo/disparity /stereo/disparity_raw /stereo/disparity_raw/compressed /stereo/disparity_raw/compressed/parameter_descriptions /stereo/disparity_raw/compressed/parameter_updates /stereo/disparity_raw/compressedDepth /stereo/disparity_raw/compressedDepth/parameter_descriptions /stereo/disparity_raw/compressedDepth/parameter_updates /stereo/disparity_raw/theora /stereo/disparity_raw/theora/parameter_descriptions /stereo/disparity_raw/theora/parameter_updates /tf
The nodelet subscribes to the following topics but it does not work for me. There are no messages on the /stereo topics. Any insights on doing this? Thanks!


What does rostopic info /kitti_stereo/left/image_rect and rostopic info /kitti_stereo/right/image_rect show? Also what does rosnode info on the rosbag node show?
Subscirbers : None for both left and right. Node [/play_1497032227332749755] rosnode info for the bag shows the default rosbag services and the publications of the rosbag. Connection is with /rosout only
@lucasw, i added the update to the quesiton.