
Tf frequency is too large
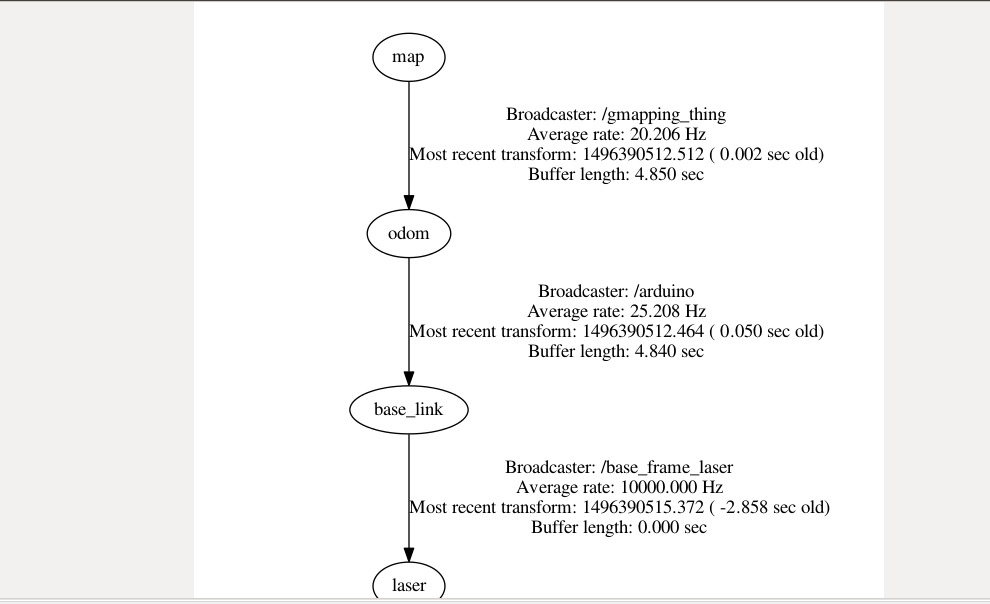
Is this frequency of tf between /base_link and /laser normal? It is 10000HZ!!!
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Is this frequency of tf between /base_link and /laser normal? It is 10000HZ!!!
@gvdhoorn is right. Static transforms go through a separate mechanism and the 10000 Hz is a shorthand way/placeholder to display the information in the same context.
You can see the buffer length is also 0.0 and the most recent transform will get quite old, but it's accurate. An enhancement could be made to the tool to display the static transforms separately with a dedicated display type.
Asked: 2017-06-02 03:08:31 -0500
Seen: 1,208 times
Last updated: Jun 22 '18
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

The most common frequency of publishing TF is 100Hz
It's probably a static transform, meaning it doesn't really have an update period. The
rateshown there is (but I'm speculating a bit here) just an indication of 'very fast' or 'instantaneous'.I'm not sure that is really something that can be so generally stated. It's completely up to the application.
Then let me rephrase it. In my experience the most common frequency of static TF publishing is 100Hz. :)
Thank you two friends! I got this.