
Hector quadcopter not responding to cmd_vel messages
I've been following this tutorial to get the hector quadcopter to work: http://wiki.ros.org/hector_quadrotor/...
I'm using Kinetic and I can see that the tutorial is a bit outdated so I have used
wstool init src https://raw.github.com/tu-darmstadt-ros-pkg/hector_quadrotor/kinetic-devel/tutorials.rosinstall
instead of the URL specified in the tutorial. catkin_make completes with no errors.
I do not have access to a controller at hand so I intend to use my keyboard for the time being. I could not find the pr2_teleop package mentioned for Kinetic but I found somewhere that teleop_twist_keyboard ( http://wiki.ros.org/teleop_twist_keyb... ) should work just fine. I start the controller using
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
I have monitored the cmd_vel topic that, according to the tutorial, is being used and the telop_twist_keyboard node does publish messages just fine.
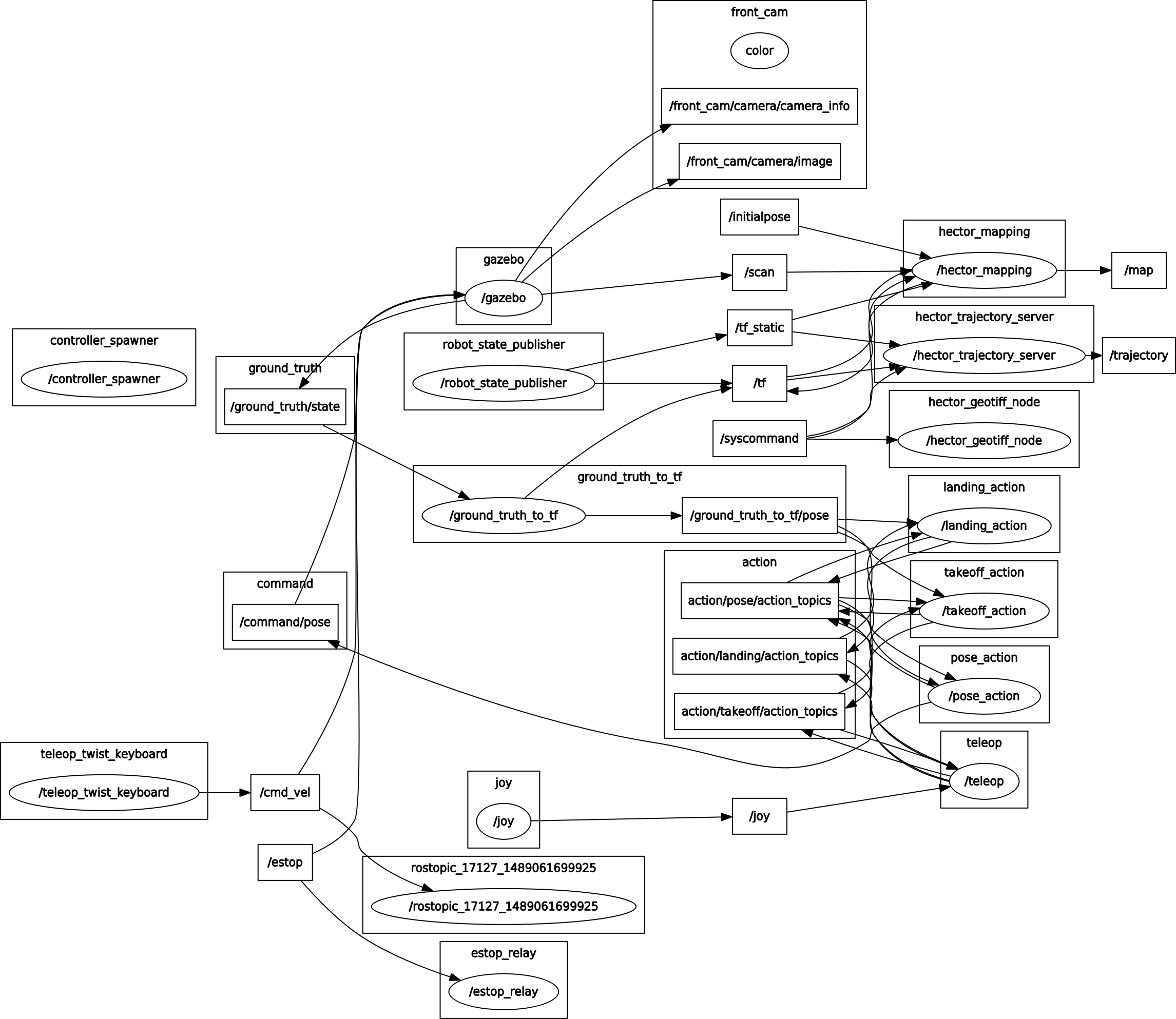
Here is a graph of my nodes that verifies the connection between the gazebo node and teleop_twist_keyboard using the cmd_vel:
However the drone does not move whatsoever and I can't find any error messages (besides one that says no joystick was found at /dev/input/js0) but I would not expect that to be the problem.
