
How to mount Razor IMU on Clearpath Husky Robot
I hope you can help me with my Razor IMU configuration (SEN-10736). I've followed the razor_imu_9dof tutorial in order to make the board work under ROS Indigo and everything works great!
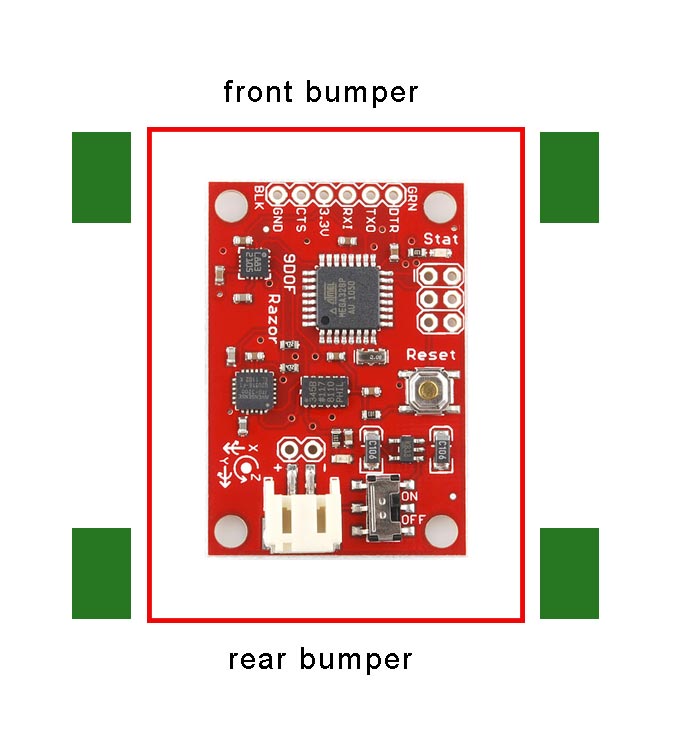
I'm just getting confused about the IMU orientation on my Clearpath Husky robot: should I mount the board by aligning the x-axis (the axis which points towards the short edge with the connector holes) towards the front bumper of my robot? Or should I use the frame orientation specified on the sensor board?
The side with the electronics component should point up or down?
By looking at the visual tool under ROS, I think I should place the IMU with the short edge pointing towards the front bumper, but what about the component side? Should it face up or down?
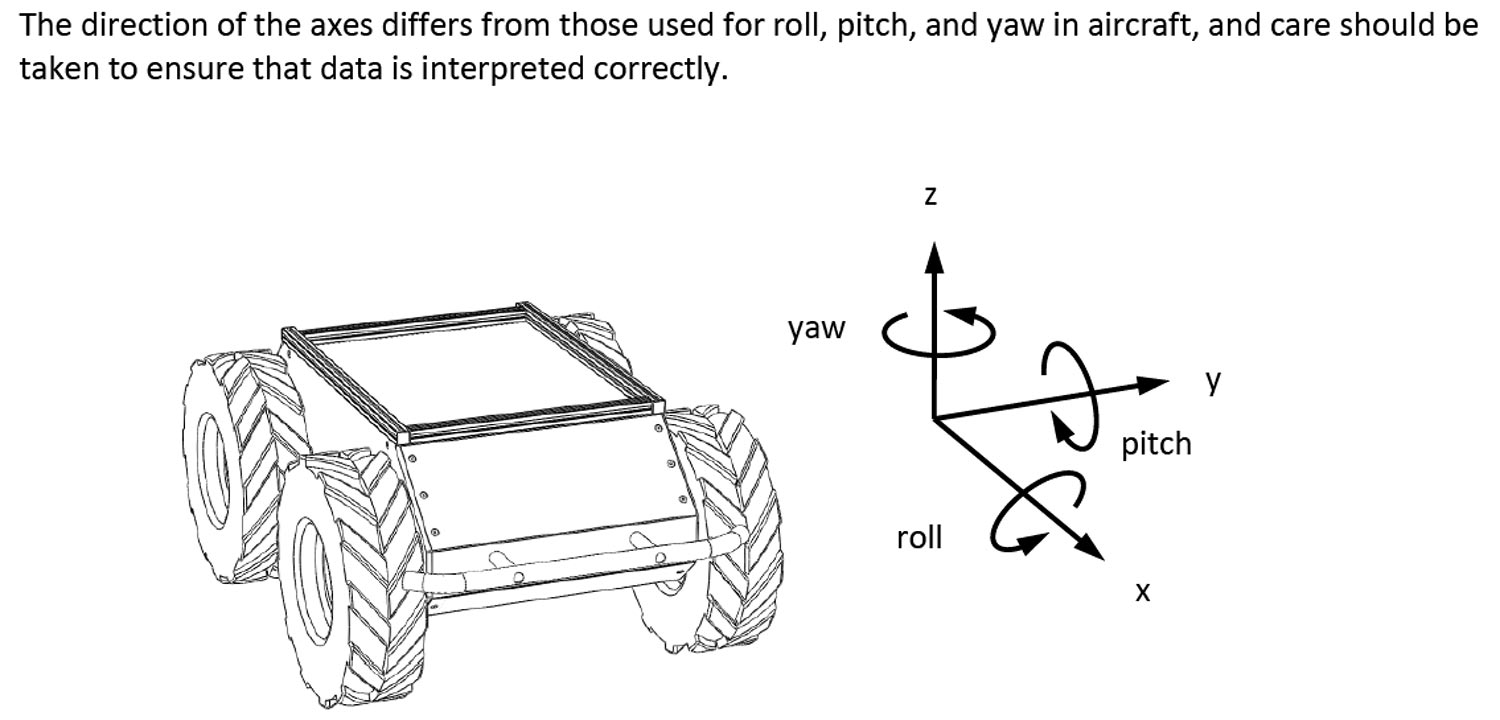
- The roll values should be positive when moving on the right side or on the left side?
- And the pitch values should be positive when moving up or down?
Thank you!
EDIT:
EDIT2:


did you find razor imu to work better than the um7 that comes with the husky?
I have a very old husky version and it doesn't include any imu sensor so I can't help you, sorry
The razor surely worked fine