
Problem with ROS Navigation on a real robot
Hello,
I have been building a robot for a university project and working with ROS Navigation stack.
I have got the robot to work in Gazebo simulation using Gazebo plugins and managed to send goal poses through Rviz successfully. However now I am trying to reproduce the same on the real robot but the goal planning isn’t going so well. It seems that the localization and the odometry update isn’t working properly.
When I give the robot very close goal poses it moves with no problems, but when I give a goal which is slightly more far on the map (a couple of feet) it starts to go off track or in case of a 90 degree turn, the robot keeps going straight and then it takes a big turn or a detour in order to return to it’s goal and gives these warnings:
[ WARN] [1488103550.240345429]: Costmap2DROS transform timeout. Current time: 1488103550.2400, global_pose stamp: 1488103548.1647, tolerance: 2.0000
[ WARN] [1488103550.241602412]: Could not get robot pose, cancelling pose reconfiguration
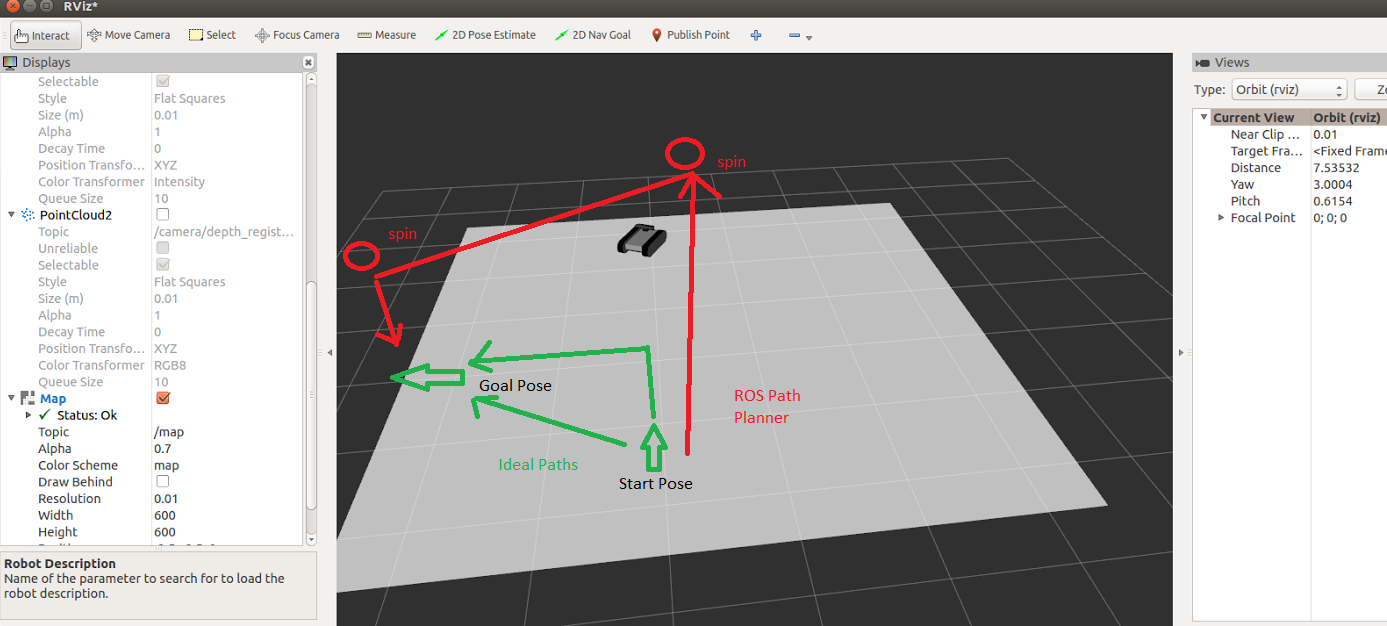
Below is an image explaining a scenario with the desired path the robot should take and the path it takes with the ROS planner:
Here is my setup:
I am using real Kinect + fake laser depthimage_to_laserscan in combination with AMCL and Move Base.
I am publishing the odometry using this class since I am using roboclaw motor shield: https://github.com/sonyccd/roboclaw_r...
I have based my move_base on this example and only changed the names of topics: https://github.com/turtlebot/turtlebo...
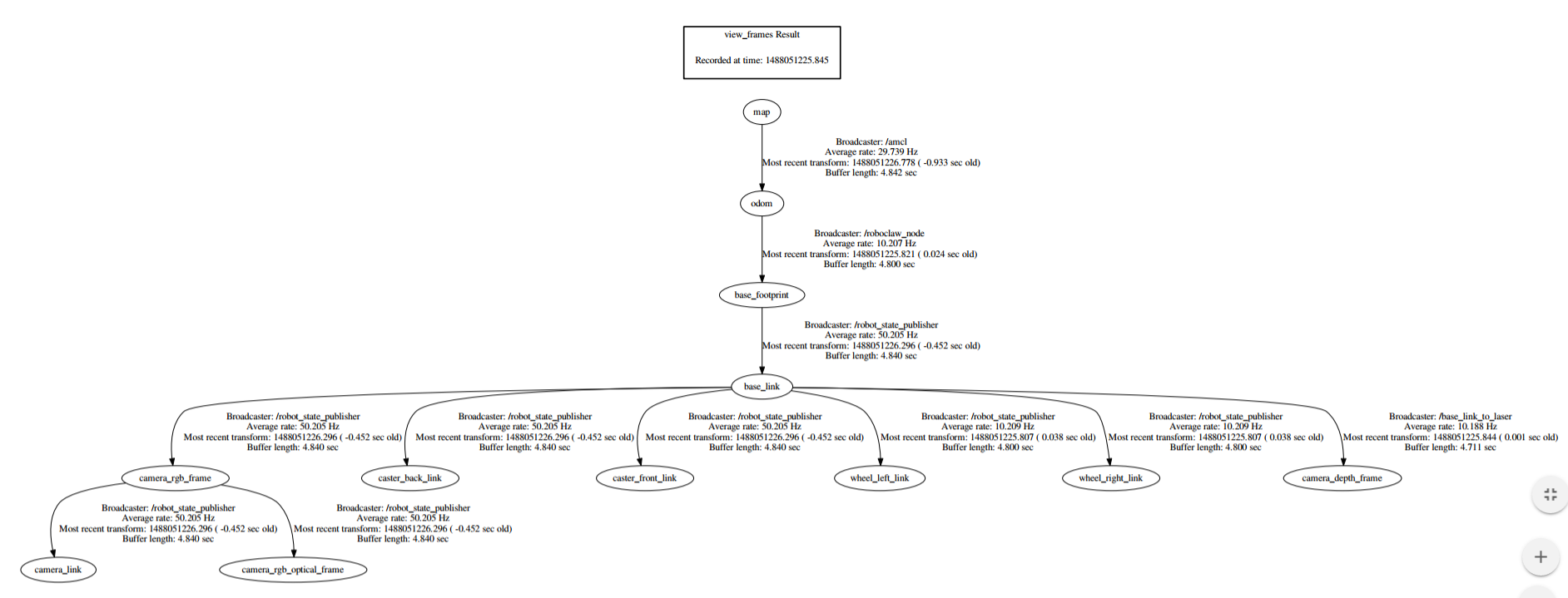
Below is my TF graph:
My navigation launch file:
<arg name="scan_topic" default="kinect_scan"/>
<arg name="odom_frame_id" default="odom"/>
<arg name="base_frame_id" default="base_link"/>
<arg name="global_frame_id" default="map"/>
<!-- DG: Kinect cloud to laser scan -->
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth/image_raw"/>
<remap from="camera_info" to="/camera/depth/camera_info"/>
<remap from="scan" to="$(arg scan_topic)"/>
<param name="range_max" type="double" value="4"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0 0 0 0 0 0 /base_link /camera_depth_frame 100"/>
<!-- Map server -->
<arg name="map_file" default="$(find rovytwo_navigation)/maps/empty/blank_map.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<arg name="use_map_topic" default="false"/>
<arg name="initial_pose_x" default="0.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="0.0"/>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/> <!-- -->
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand ...

Please attach all images directly to your post. If you ever delete them from your google drive, this question becomes useless / unintelligible. I've given you enough karma.
As to text files (ie: launch files), same rationale: please include them directly into your question. Use the Preformatted Text button (the one with
101010on it) to make sure things are formatted properly.Thanks for adding the karma. I have now included all images and code snippets to the post.