
Collision issue
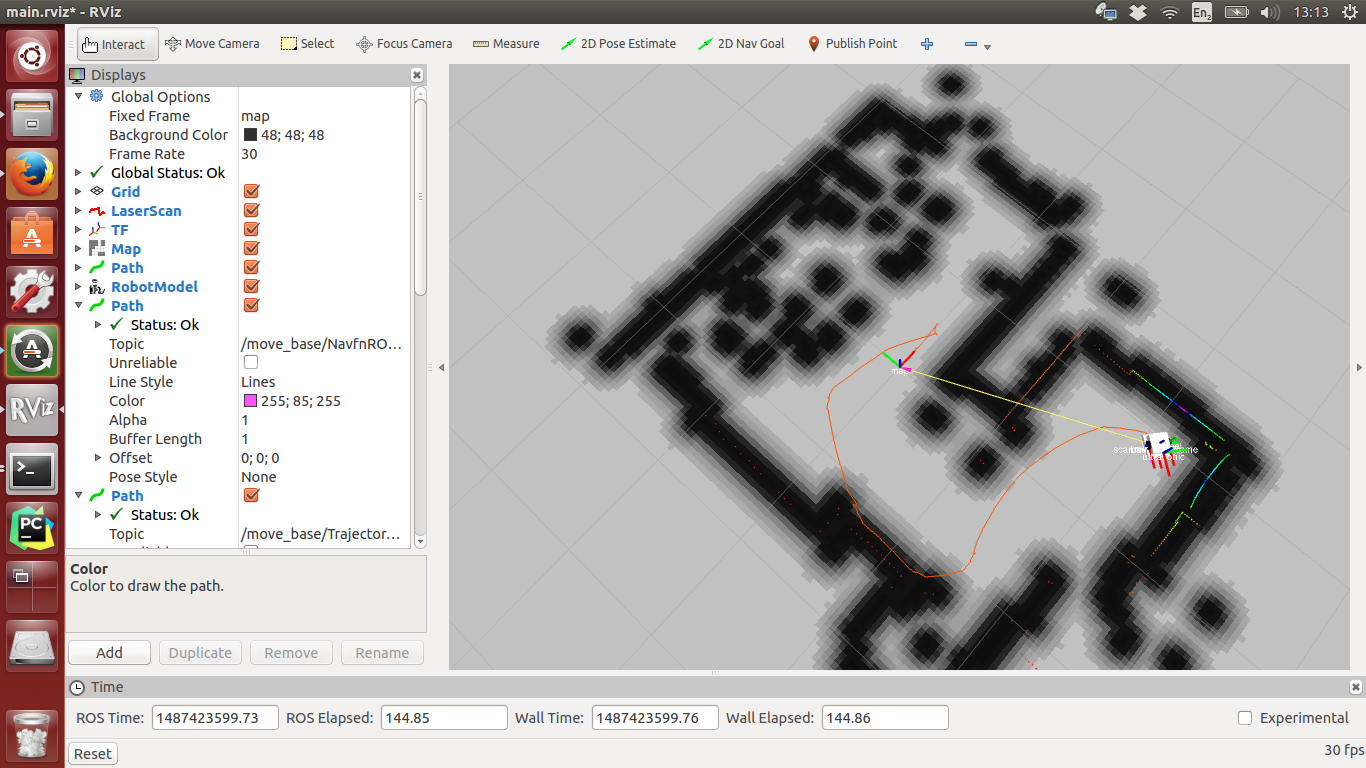
So I am a little confused, my robot plans the route fine but then piles in to the obstacles, the green line is always spot on what it needs to do, the SLAM positions the robot fine etc. but the actual route it takes (purple) takes it far too near obstacles
Second question, why is my /map never moving with my robot?

I have a footprint, and collision enabled on the URDF. Could this be a motor control issue?
local_costmap:
global_frame: /map
robot_base_frame: /scanmatcher_frame
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 4.0 # The width of the map in meters. default 10
height: 4.0 # The height of the map in meters. default 10
resolution: 0.05 # The resolution of the map in meters/cell. default 0.05
transform_tolerance: 0.5
global_costmap:
global_frame: /map
robot_base_frame: /scanmatcher_frame
update_frequency: 1.0
publish_frequency: 0.5
static_map: true #
transform_tolerance: 0.5
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [ [0.08, 0.08], [-0.08, 0.08], [-0.08, -0.08], [0.08, -0.08] ]
inflation_radius: 0.3
map_type: costmap
observation_sources: scan bump
scan: {data_type: LaserScan, topic: scan, marking: true, clearing: true, min_obstacle_height: 0.25, max_obstacle_height: 0.35}
bump: {data_type: PointCloud2, topic: mobile_base/sensors/bumper_pointcloud, marking: true, clearing: false, min_obstacle_height: 0.0, max_obstacle_height: 0.15}
TrajectoryPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.5
min_vel_x: 0.1
max_vel_theta: 1.5
min_vel_theta: -1.5
min_in_place_vel_theta: 1.0
acc_lim_x: 0.6
acc_lim_theta: 1.0
# Goal Tolerance Parameters
yaw_goal_tolerance: 3.14
xy_goal_tolerance: 0.15
# Forward Simulation Parameters
sim_time: 3.0
vx_samples: 6
vtheta_samples: 20
# Trajectory Scoring Parameters
meter_scoring: true
pdist_scale: 0.6
gdist_scale: 0.8
occdist_scale: 0.01
heading_lookahead: 0.325
dwa: true
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05
# Differential-drive robot configuration
holonomic_robot: false
add a comment
