
No transform from [base_link] to [/map]
I know similar questions have been asked but I think mine is a little different.
I have a custom robot which is running Hector_Slam and the navigation stack etc, all is working well. However I been advised to add a model (URDF) to the project so I can tell the system where my new sensors are going to go.
My Fixed frame is /map or I can use /laser
I created my robot which its top level thing seems to be base_link. It complains that there is No transform from [base_link] to [/map]?
It also complains there is no No transform from [lwheel] to [/map] and so on? If I fix the base_link error will it make the others go away? (the wheels are linked to base_link)
In my Hector Launch File I see lots or references to
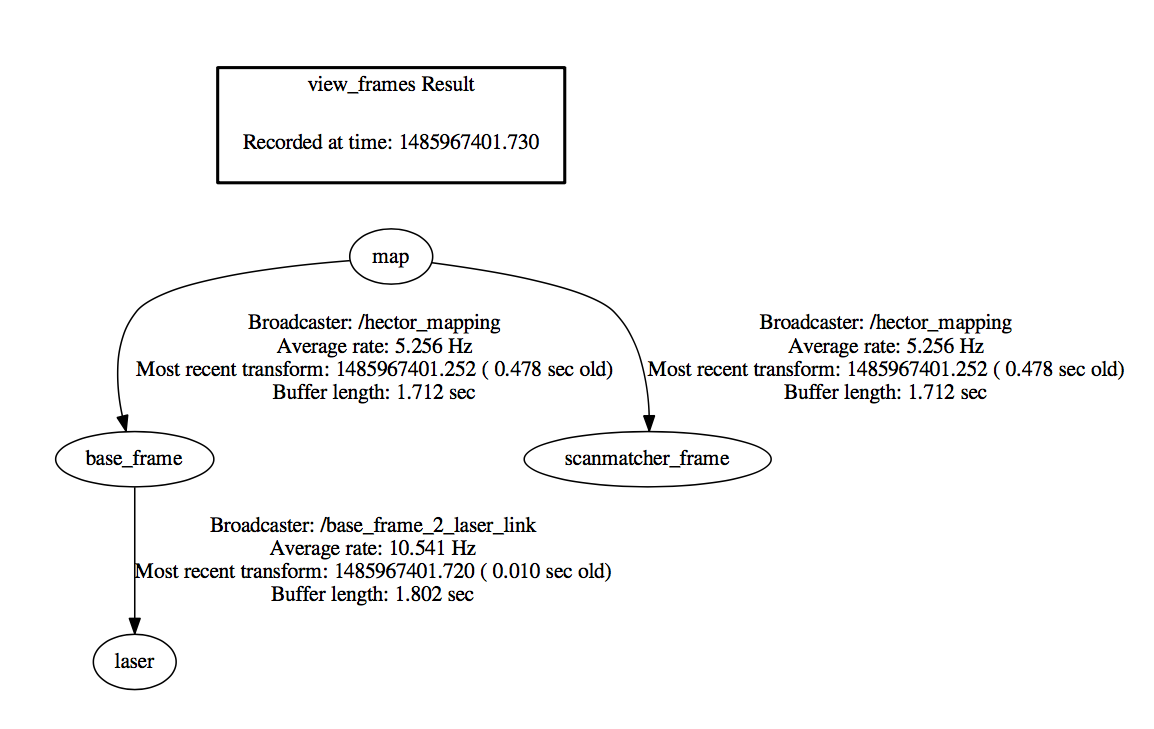
<param name="base_frame" value="base_frame"/>
But nothing to base_link


To make things slightly simpler:
yes.
Man I need to buy you a beer or a pack. Any idea how I link base_link to map?
Randomly I changed the base_link to base_frame however the wheel etc error did not go away