
[navigation stack] strange angular velocity
Hi all
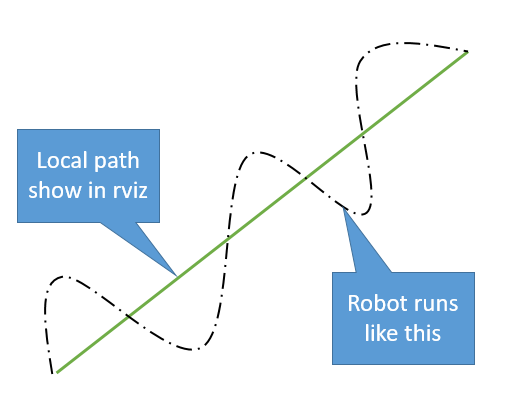
I follow the navigation tutorials to get the navigation stack with teb_local_planner running on my tricycle robot. The path in Rviz displayed as well. But the robot doesn't follow the path. The cmd_vel is so strange. The angular.z is too large. See the image below. Sorry for my bad english.
Thanks first.
My teb_local_planner config:
TebLocalPlannerROS:
odom_topic: odom
map_frame: /map
# Trajectory
teb_autosize: True
dt_ref: 0.3
dt_hysteresis: 0.1
global_plan_overwrite_orientation: True
max_global_plan_lookahead_dist: 5.0
feasibility_check_no_poses: 5
# Robot
cmd_angle_instead_rotvel: True
max_vel_x: 0.3
max_vel_x_backwards: 0.3
max_vel_theta: 0.3
acc_lim_x: 1.5
acc_lim_theta: 1.1
min_turning_radius: 2
wheelbase: 0
footprint_model: # types: "point", "circular", "two_circles", "line", "polygon"
type: "line"
line_start: [-1, 0.0] # for type "line"
line_end: [1, 0.0] # for type "line"
# GoalTolerance
xy_goal_tolerance: 0.3
yaw_goal_tolerance: 0.1
free_goal_vel: False
# Obstacles
min_obstacle_dist: 0.30
include_costmap_obstacles: True
costmap_obstacles_behind_robot_dist: 1
obstacle_poses_affected: 30
costmap_converter_plugin: ""
costmap_converter_spin_thread: True
costmap_converter_rate: 5
# Optimization
no_inner_iterations: 5
no_outer_iterations: 4
optimization_activate: True
optimization_verbose: False
penalty_epsilon: 0.1
weight_max_vel_x: 2
weight_max_vel_theta: 1
weight_acc_lim_x: 1
weight_acc_lim_theta: 1
weight_kinematics_nh: 1000
weight_kinematics_forward_drive: 1
weight_kinematics_turning_radius: 1
weight_optimaltime: 1
weight_obstacle: 50
weight_dynamic_obstacle: 10 # not in use yet
alternative_time_cost: False # not in use yet
# Homotopy Class Planner
enable_homotopy_class_planning: False
enable_multithreading: False
simple_exploration: False
max_number_classes: 4
roadmap_graph_no_samples: 15
roadmap_graph_area_width: 5
h_signature_prescaler: 0.5
h_signature_threshold: 0.1
obstacle_keypoint_offset: 0.1
obstacle_heading_threshold: 0.45
visualize_hc_graph: False
Edit: Many thanks to croesmann.
Oh it's my mistake, I was uploaded my old config file which cannot work. Here is my new one. Because my robot quite big so i set min_turning_radius to 2.5m. I use agular.z and linear.x to calculate tracking velocity and steering angle. I will try with cmd_angle_instead_rotvel set to False. Maybe it's can be solved.
# Robot
cmd_angle_instead_rotvel: True
max_vel_x: 0.2
min_vel_x: 0.05
max_vel_x_backwards: 0.2
max_vel_theta: 0.3
# min_vel_theta: -0.3
acc_lim_x: 0.5
acc_lim_theta: 0.5
min_turning_radius: 2.5
wheelbase: 1.772
footprint_model: # types: "point", "circular", "two_circles", "line", "polygon"
type: "line"
line_start: [-0.886, 0.0] # for type "line"
line_end: [0.886, 0.0] # for type "line"
# GoalTolerance
xy_goal_tolerance: 0.3
yaw_goal_tolerance: 0.2
free_goal_vel: False
# Obstacles
min_obstacle_dist: 0.5
include_costmap_obstacles: True
costmap_obstacles_behind_robot_dist: 1
obstacle_poses_affected: 30
costmap_converter_plugin: ""
costmap_converter_spin_thread: True
costmap_converter_rate: 5
# Optimization
no_inner_iterations: 5
no_outer_iterations: 4
optimization_activate: True
optimization_verbose: False
penalty_epsilon: 0.1
weight_max_vel_x: 1 #2
weight_max_vel_theta: 0.5 #1
weight_acc_lim_x: 0.0 #1
weight_acc_lim_theta: 0.0 #1
weight_kinematics_nh: 1000
weight_kinematics_forward_drive: 1
weight_kinematics_turning_radius: 1
weight_optimaltime: 1
weight_obstacle: 50
weight_dynamic_obstacle: 10 # not in use yet
selection_alternative_time_cost: False
# alternative_time_cost: False # not in use yet
# Homotopy Class Planner
enable_homotopy_class_planning: True #False
enable_multithreading: True #False
simple_exploration: False
max_number_classes: 4
roadmap_graph_no_samples: 15
roadmap_graph_area_width: 5
h_signature_prescaler: 0.5
h_signature_threshold: 0.1
obstacle_keypoint_offset: 0.1
obstacle_heading_threshold: 0.45
visualize_hc_graph: False
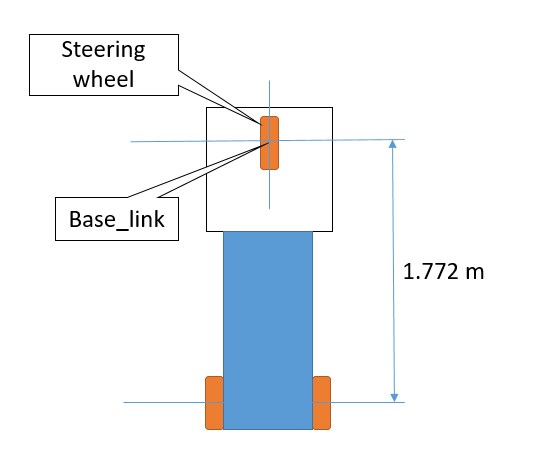
My robot description

@Nguyen: please don't post an answer to provide us with more / updated information. Instead, please edit your original question. Use the edit link/button for that. I've moved the content to your question, but please keep it in mind.
Thanks.
Thank you @gvdhoorn.