
Some questions about AMCL

Hi,
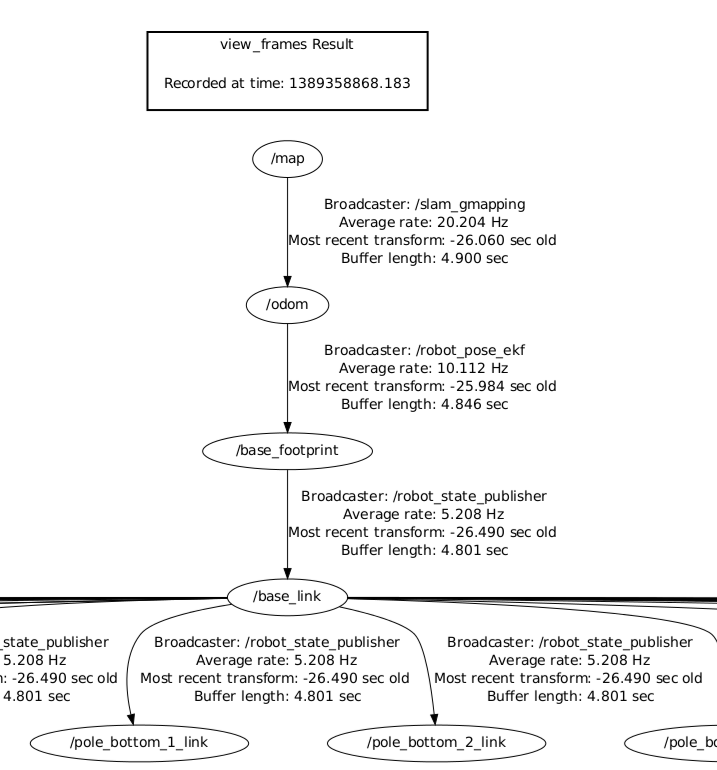
I am working on amcl recently, I have some questions about it. The tf tree is like the picture below.
- I found in other questions that amcl receives information from tf between odom and base_link frames, then broadcast tf between map and odom frames after correcting to implement localization. I am not sure if I understand correctly.
- Suppose the coordinate of odom under map frame is (x1, y1), base_link under odom is (x2, y2). So if I understand correctly, the coordinate of base_link under map frame is (x, y), i.e. x=x1+x2, y=y1+y2. Is it right?
- What role does base_footprint frame play?
Thanks.
add a comment
