
Questions about API
Q1: Why does API split into 3 parts, ROS, C++, Python respectively?
Q2: Why some of them are identical in the same row, while others different?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Q1: Why does API split into 3 parts, ROS, C++, Python respectively?
Q2: Why some of them are identical in the same row, while others different?
Actually, you basically copied the answer in here as well :-)
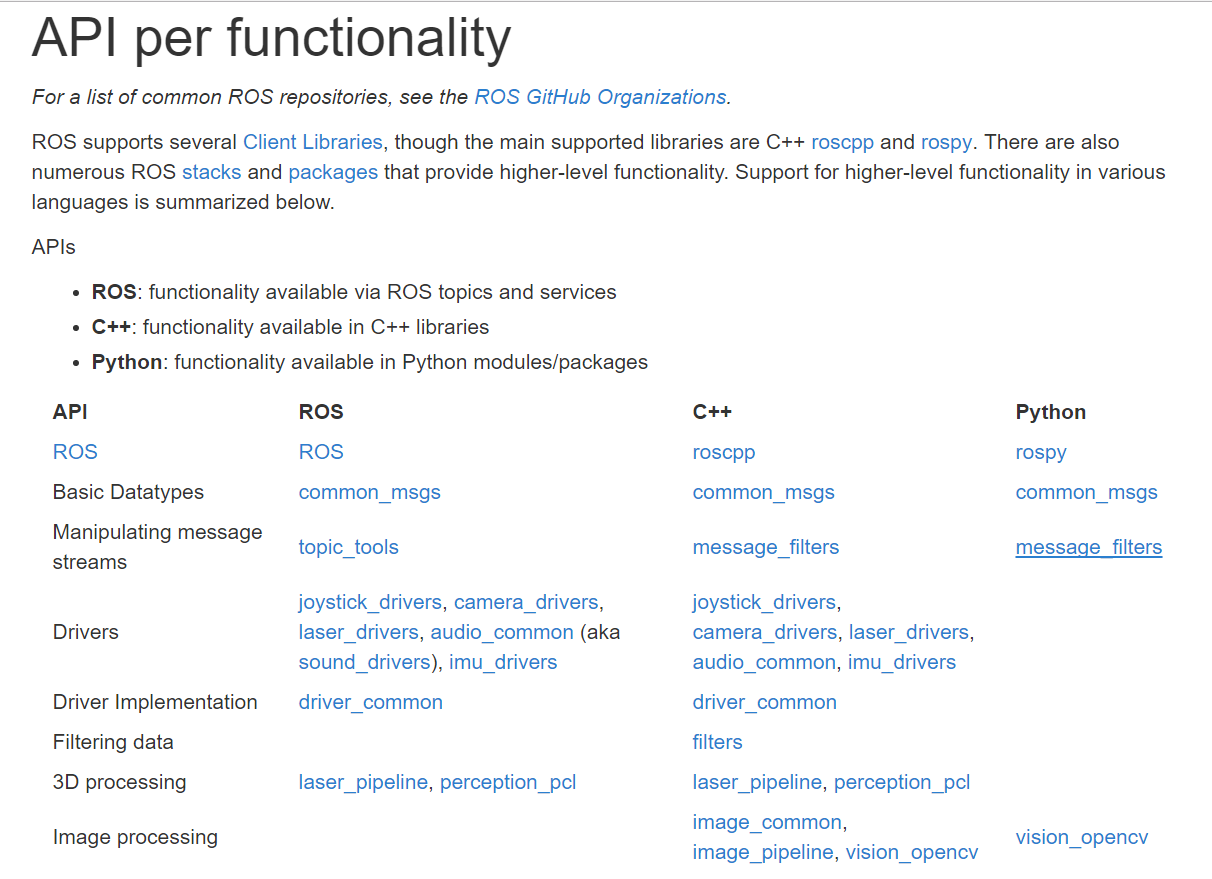
ROS: functionality available via ROS topics and services
C++: functionality available in C++ libraries
Python: functionality available in Python modules/packages
ROS has client libraries, roscpp and rospy that allow you to use ROS functionalities in C++ and Python code, respectively.
So, you have a C++ API), to e.g. use Publishers and Subscribers, as well as a Python API. Those two are obviously different.
From the outside, a topic looks, however, the same, wether it comes from a python or a C++ node. You can manipulate this e.g. using the topic_tools package, which are just ROS nodes written in either C++ or python.
However, this is only a very rough overview, don't get stuck too much on this list.
Asked: 2016-11-23 00:52:04 -0500
Seen: 189 times
Last updated: Nov 23 '16
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
