
sliding-scan problem when gmaping

I met error when i use gmaping:
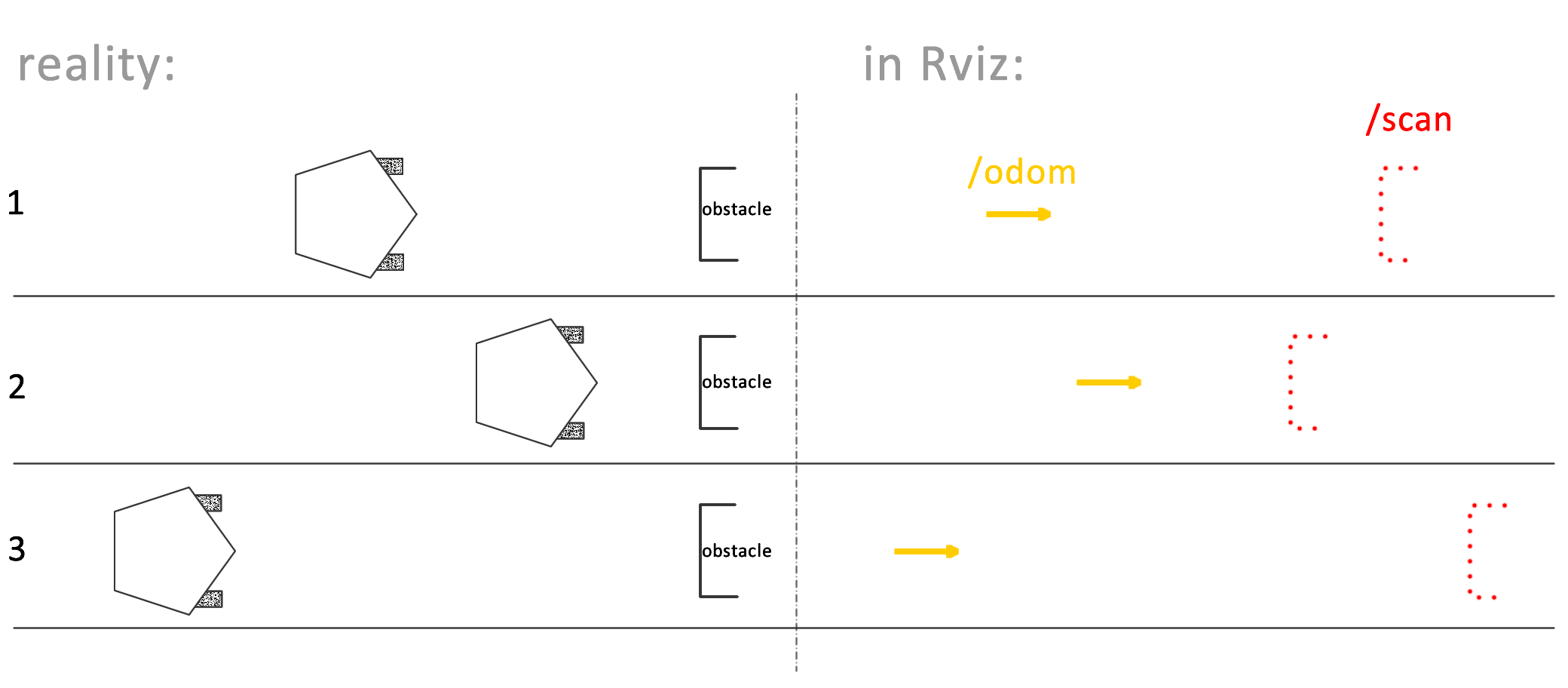
in rviz , i see the simulated position is 1/2 of the reality, when i was using gmapping + laser_scaner to build the map.
when I echo the topic /odom , it shows me the right value. is there experts tell me how to configure this?
please see the figure below:
Thank You Very Much!!
I refered the gmaping wiki page and met the tf requirements. I'm using ros_indigo.
my Question is: How to configure my gmapping or other things to make the /scan can be relative static with /map? so I can build reasonable map.

using
arduino_ros_bridge;neato_xv11_driver;robot_setup_tfandteleop_twist_keyboardWhat is the actual question here?
How to configure my gmapping or other things to make the /scan can be relative static with /map? so I can build reasonable map.
What you describe is similar to what is mentioned in this tutorial on setting up a navigation stack. It seems as if your transnational odometry is underestimated. How eactly are you checking that the /odom topic is correct? Are you comparing it with a physical measurement?
thank shoemakerlevy9! I did check the /odom data and the real distance robot moved. less than 5% error. I correct this sliding-scan problem by using the launch file. but I met another problem.