
How to build map using rviz
Hello,
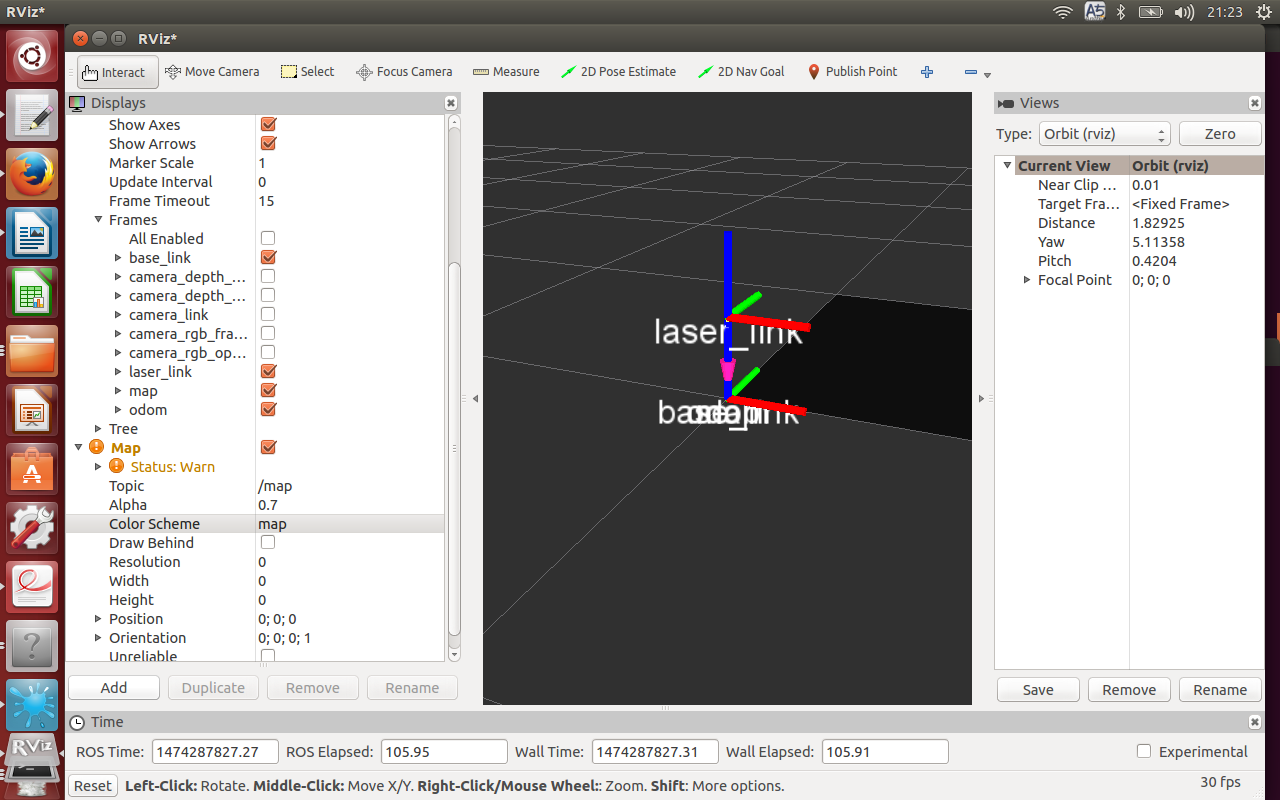
I could not build map using rviz. The map error message is " No map received".
My tf is odom →base_link →laser_link →camera_link
I uses raspberrypi 2 and build my robot by using it.
the node is the following
- terminal1:rosrun ros_move ros_move (moving robot by using joystick:raspberrypi)
- terminal2:rosrun ros_encoder ros_encoder (I uses encoder:raspberrypi)
- terminal3:rosrun joy joy_node (joystick :laptop)
- terminal4:rosrun base_controller base_controller_node (broadcast tf :laptop)
Probably the above stated node don't have problem because I could build a map before without using rviz.
- terminal5:roslaunch freenect_launch freenect.launch
- terminal6:rosrun image_view image_view image:=/camera/depth/image_raw
- terminal7:rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/depth/image_raw
- terminal8:rviz
- terminal9:roslaunch robo_slam robo_slam.launch
- terminal10:rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 /laser_link /camera_link 100
- ・・・(The rviz don't build map)
Please let me know how to solve the problem.
Thank you.
add a comment
