
Unable to spawn a p3at in gazebo

Using; 1. Ubuntu 14.04 LTS/ROS indigo/ Gazebo/p3at as robot
I wish to spawn my p3at into gazebosim. my launch file is following;
<launch>
<!--##########################################################################-->
<!--Launching gazebo world -->
<arg name="world" default="my_world"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="true" />
<arg name="world_name" value="$(find scca)/worlds/$(arg world).world"/>
</include>
<!--##########################################################################-->
<!-- Spawn a robot into Gazebo -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-file $(find p3at_description)/urdf/p3at1.urdf -urdf -z 1 -model P3AT" />
<!--##########################################################################-->
<!--##########################################################################-->
</launch>
it is not throwing any error message, but unable to spawn p3at in gazebo.
EDIT-1:
If i run urdf separately i.e. scca.launch as;
<launch>
<!--##########################################################################-->
<!--Launching gazebo world -->
<arg name="world" default="my_world"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="true" />
<arg name="world_name" value="$(find scca)/worlds/$(arg world).world"/>
</include>
</launch>
and urdf file as;
rosrun gazebo_ros spawn_model -file `rospack find p3at_description`/urdf/p3at1.urdf -urdf -z 1 -model p3at
it gives a success message, as;
spawn_model script started
[INFO] [WallTime: 1473777604.025414] [0.000000] Loading model xml from file
[INFO] [WallTime: 1473777604.025924] [0.000000] Waiting for service /gazebo/spawn_urdf_model
[INFO] [WallTime: 1473777604.028502] [0.000000] Calling service /gazebo/spawn_urdf_model
[INFO] [WallTime: 1473777604.125985] [7418.063000] Spawn status: SpawnModel: Successfully spawned model
bcr-lab@bcrlab-HP-Z800-Workstation:~$
but unable to spawn p3at in gazebo.
EDIT-2
One warning appears;
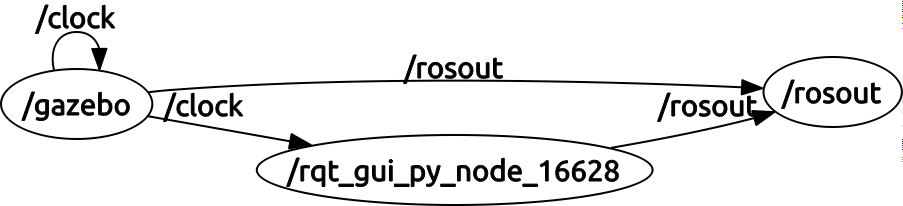
and here is rqt graph
add a comment
