
AMCL Global Localization Upside Down
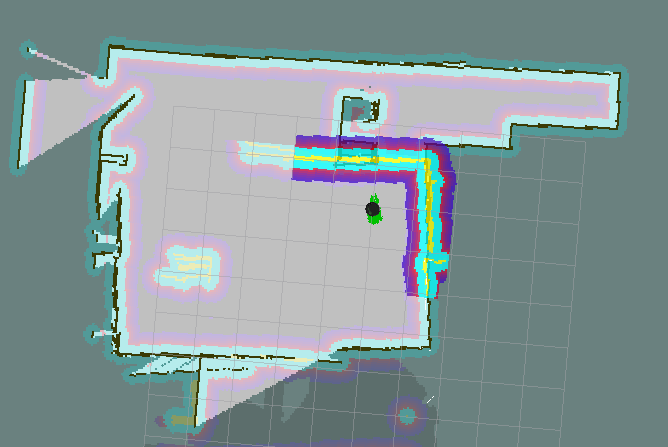
Seems like AMCL does a really bad job of localizing in the map. I'm using the global_localization service to distribute the particles across the map initially, but the results are things like this:
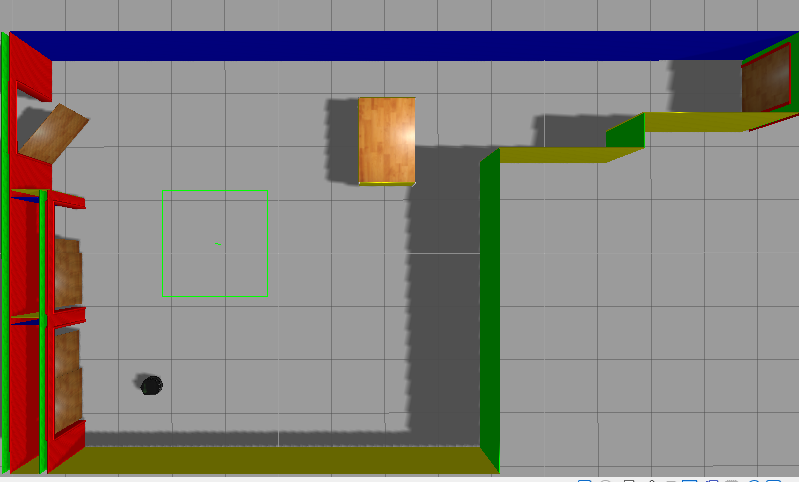
when in fact the robot is staring at a corner like this:
Thoughts on what I'm missing here? Or what I need to look into to improve my results?
add a comment
