
robot_localization publishing to tf incorrectly
I have left the robot_localization odom_frame parameter with value "odom" and base_link_frame to "base_link" defaults. The tf tree, while running robot_localization and the robot driver ca_driver with publish_tf set to "false". Looks like this (apparently I can't upload a file with less than 5 points): odom floating. base_footprint ---> base_link (broadcaster /ekf_localization) base_link --> right_wheel link (broadcaster /robot_state_publisher) base_link --> left_wheel link (broadcaster /robot_state_publisher) ....
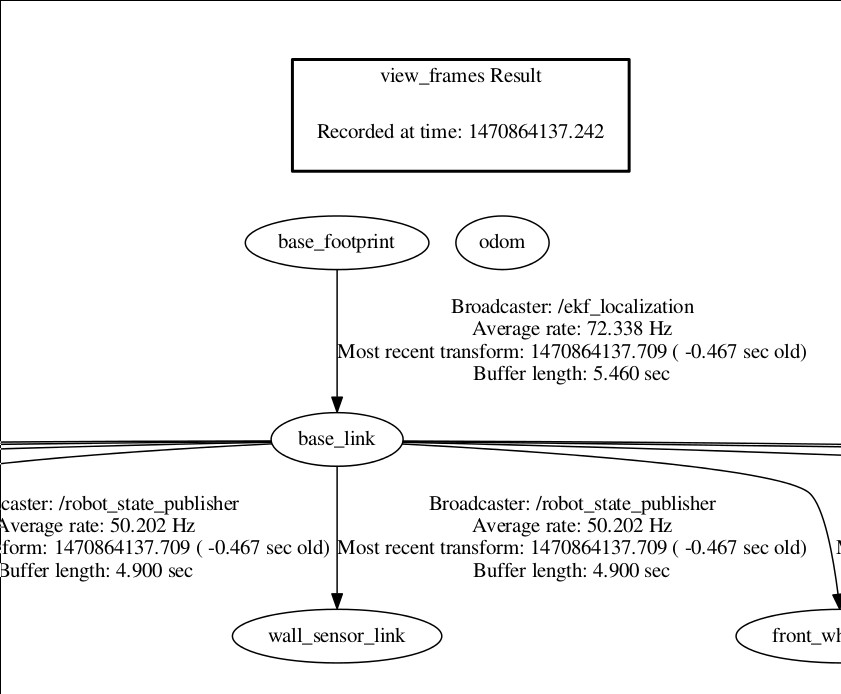
why is ekf_localization broadcasting base_footprint --> base_link ? and leaving odom floating? (not connected to anything) I can't even find base_footprint anywhere in the robot_localization parameter list. It is part of the robot description. Any help clarifying this would be appreciated.
Edit
Adding image of original tf tree

I've bumped your karma; you should be able to post images now.
Thank you. I've posted image.