
Robot is not moving, Please check my rqt_graph
Hello everyone, i'm trying to create a map for my robot, i'm following this guide:
So, i launch my_robot_configuration.launch and move_base.launch from the navigation stack.
i'm giving the following commands from the previous guide:
rosrun gmapping slam_gmapping scan:=sonar_laser_scan
rosbag record -O sonarscan /sonar_laser_scan /tf
Everything seems okay, so now i open rviz to lookup what is going on:
rosrun rviz rviz
and set up a static map on topic /map to see the results.
The maps shows up, but the robot is stuck in start position. I would like to let my robot move avoiding obstacles in order to create a map. I tried to set up 2d nav goal, but nothing is happening.
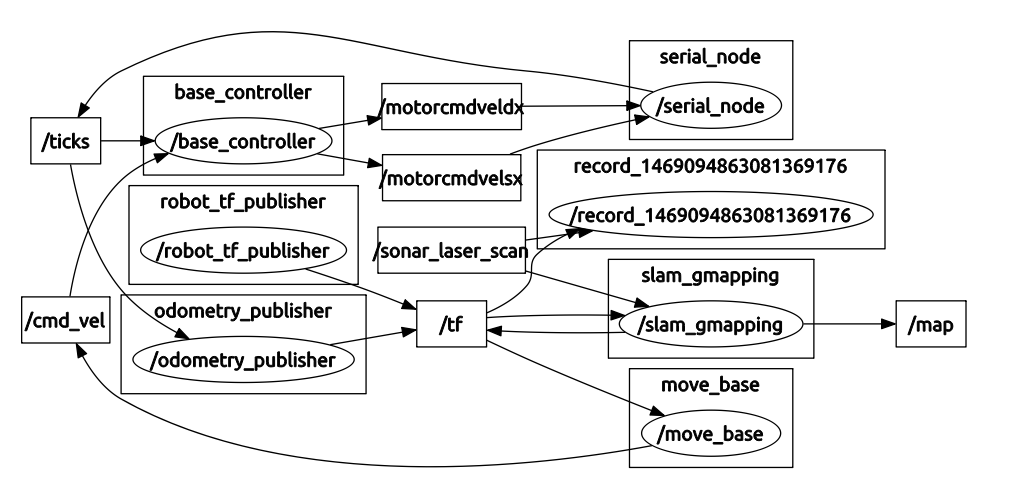
Here is my rqt_graph:
Here is my rviz:
How can i move my robot in order to create the map? is there something wrong with my rqt_graph? Thank u so much!

{kind=link}
{kind=link}
move_base is not publishing to any topics. There are no planners being executed when you give a goal, hence your robot is not moving. Did you rectify this? It has been some time since you posted this. Regards