
What's the rational behind laser_filters/ScanShadowsFilter?

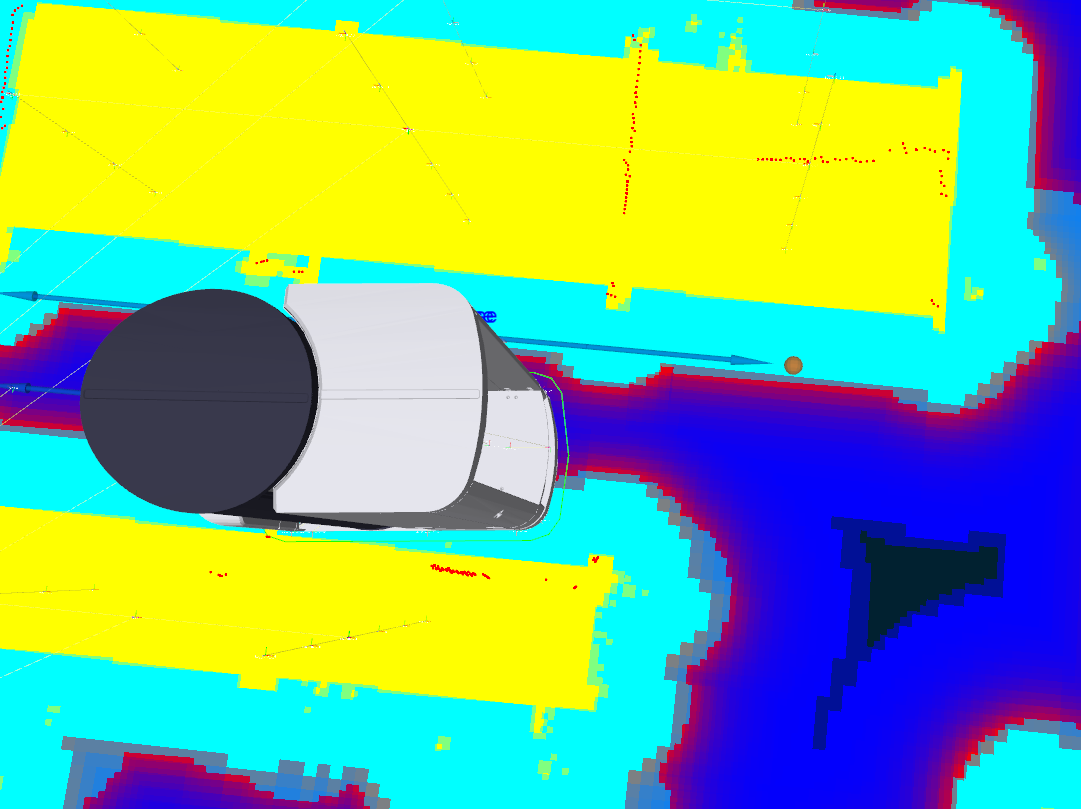
Hi, looking for a filter to remove spurious points in out Sick laser, I gave a try to ScanShadowsFilter. It remove most of the noisy beams, but also some valid data. Moreover, I don't fully understand what the filter really does and how this relates to the physics of laser scanners. Can anyone extend the wiki explanation, so I can better decide which parameters to use?
Thank you a lot
Unfiltered:
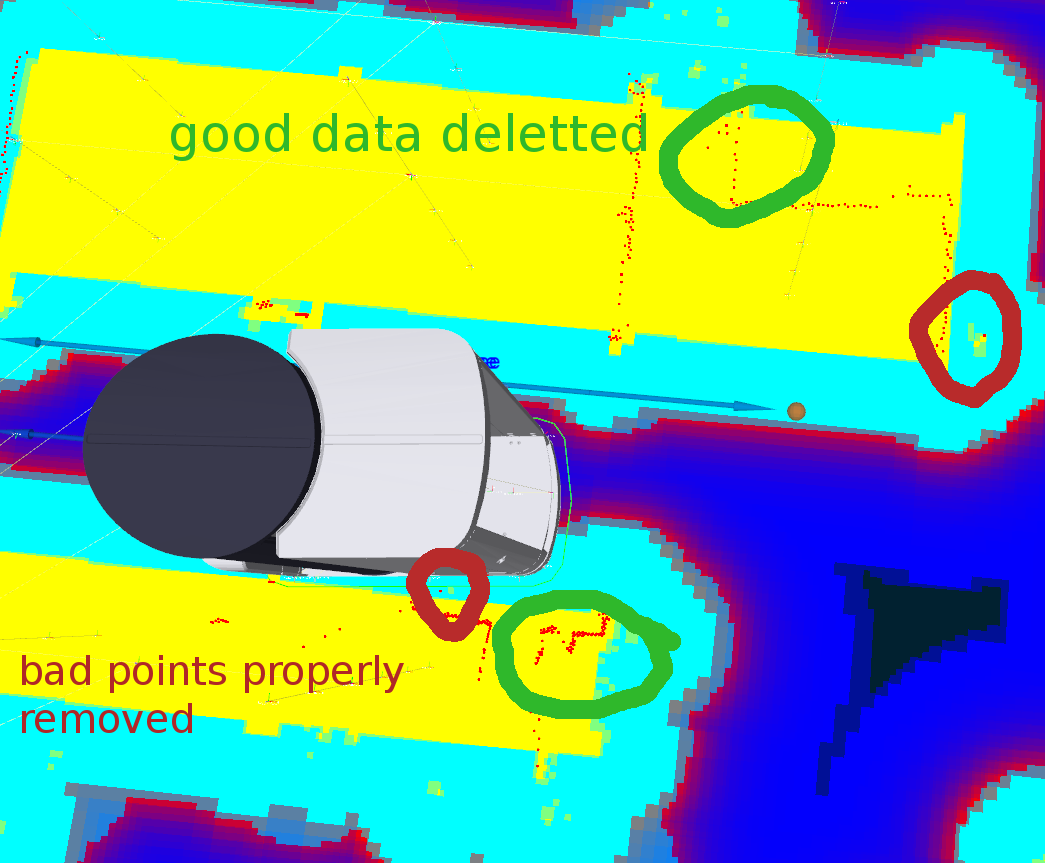
Filtered:

What are the settings you were using for the ScanShadowsFilter? Here are mine: https://github.com/uos/calvin_robot/b...