
How does MSF estimate heading ?
Hi All,
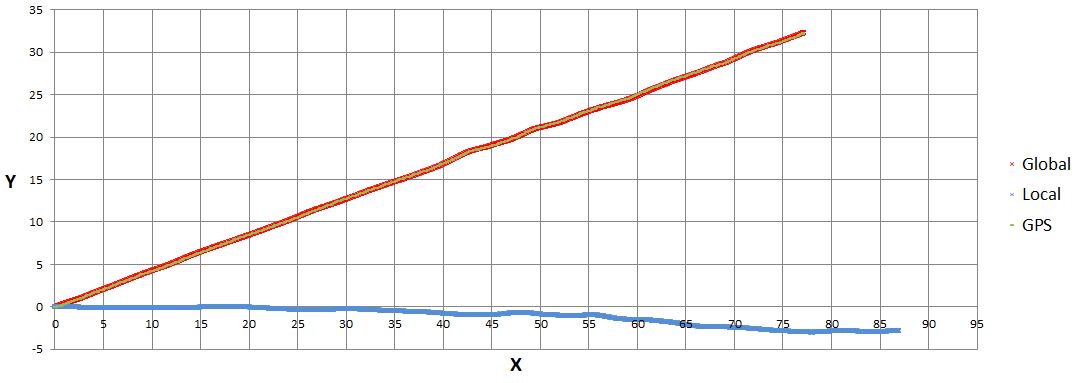
I am relatively new to MSF and am trying to set it up for estimating the pose(absolute) of a ground vehicle. There are two update pose sensors (in addition to IMU for prediction step). One pose sensor provides absolute pose measurements in the world frame and the second one provides a relative pose (odometric data). The setup seems to work okay but the heading seems to be off. More precisely, the movement of the robot seems to be interpreted along the global frame and not the local frame. To clarify, a x velocity translates the robot along the global x axis and not the local x axis. I know this is not a lot to debug the problem, but is there something that I am doing wrong ? If some information/links could be provided as to the part where heading is estimated and how it is being estimated, it would be really helpful. Thanks.
-Abhishek


It would help to have a little more information about your system - ROS distro, launch files, bag files etc. But first, check that your local and global frames have the same origin and orientation - if they don't the odometry can be very different in each one.
Distro: Indigo, launch file being used: position_pose_sensor.launch (supplied with MSF). The data is composed of: pose data from wheel encoders on a simulated robot and absolute pose data from vicon. The part about the global and local frames having same origin and orientation is satisfied.