
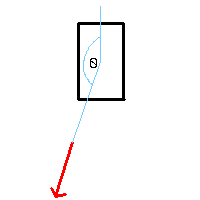
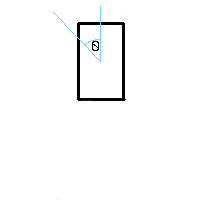
move_base turns clockwise when counterclockwise would be faster
In both of the scenarios depicted below, by robot turns clockwise. counterclockwise is obviously much faster. It will however turn counterclockwise if the goal is very close to in front of the robot, around 30deg maybe. Anything past that turns the other way.
I have min_rot_vel set to 0.07, since according to the DWA_local_planner wiki, it's an absolute value.
add a comment
