
error while building 2d map
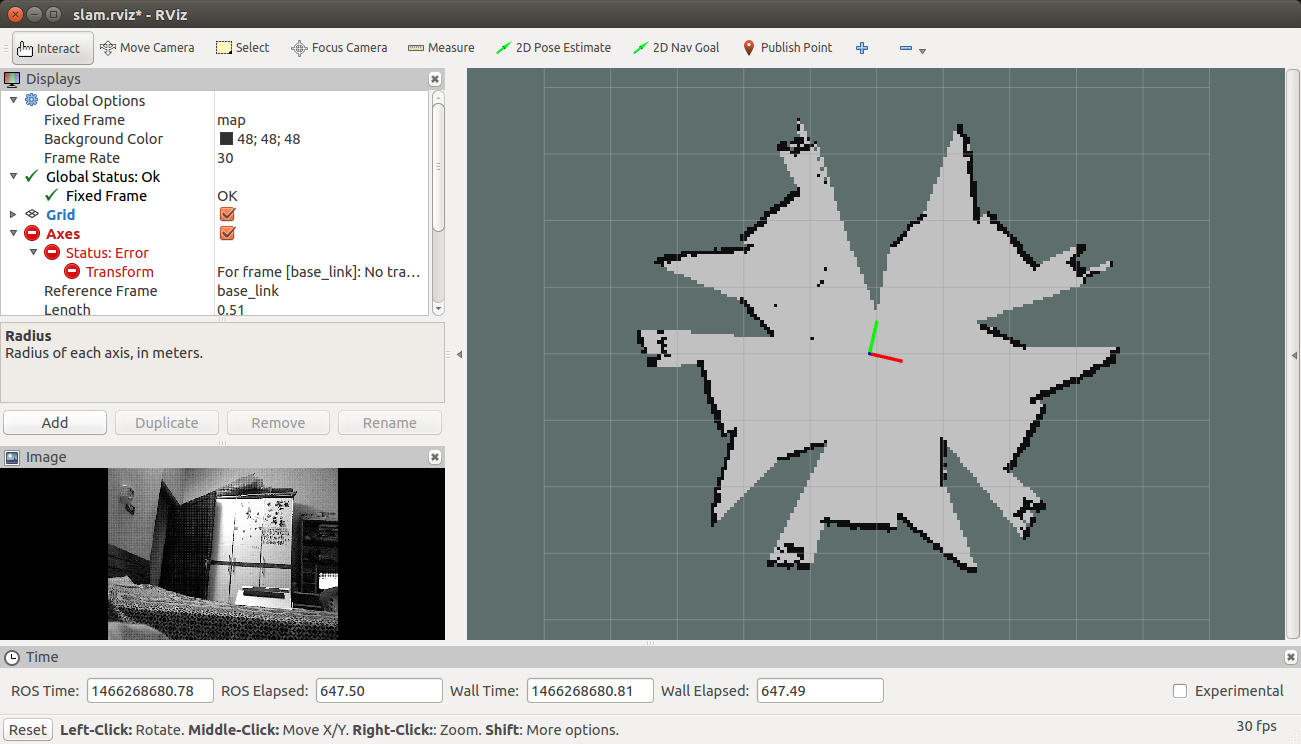
hi i am trying to build 2d map i go just part of the map and git in the axis error that say in rviz: Transform For frame [base_link]: No transform to fixed frame [map]. TF error: [Could not find a connection between 'map' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.] ithe odometery data are publishing and the kinect work fine i don't know where the problem is i will include all the information that can help: i am using indigo first i use this launch file
<launch>
<node pkg="tf" type="static_transform_publisher" name="base_to_kinect_broadcaster" args="-0.17 0.04 0.1975 0 0 0 \/base_link \/camera_link 100"/>
<include file="$(find beginner_tutorials)/launch/kinect_laser.launch"/>
<node name="arduino_serial_node" pkg="rosserial_python" type="serial_node.py" output="screen">
<param name="port" value="/dev/ttyACM0" />
<param name="baud" value="115200" />
</node>
<node name="base_controller_node" pkg="beginner_tutorials" type="base_controller">
<param name="publish_tf" value="true" />
<param name="publish_rate" value="10.0" />
<param name="linear_scale_positive" value="0.99" />
<param name="linear_scale_negative" value="0.99" />
<param name="angular_scale_positive" value="1.0" />
<param name="angular_scale_negative" value="1.0" />
<param name="angular_scale_accel" value="0.0" />
<param name="alpha" value="0.5" />
<param name="use_imu" value="true" />
</node>
</launch>
and
<launch>
<include file="$(find beginner_tutorials)/launch/view_mobile_robot.launch"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"> </node>
<node name="teleop" pkg="teleop_twist_keyboard" type="teleop_twist_keyboard.py" output="screen" launch-prefix="xterm -e"/>
<node pkg="rviz" name="rviz" type="rviz" args="-d $(find beginner_tutorials)/launch/rviz/slam.rviz"/>
</launch>
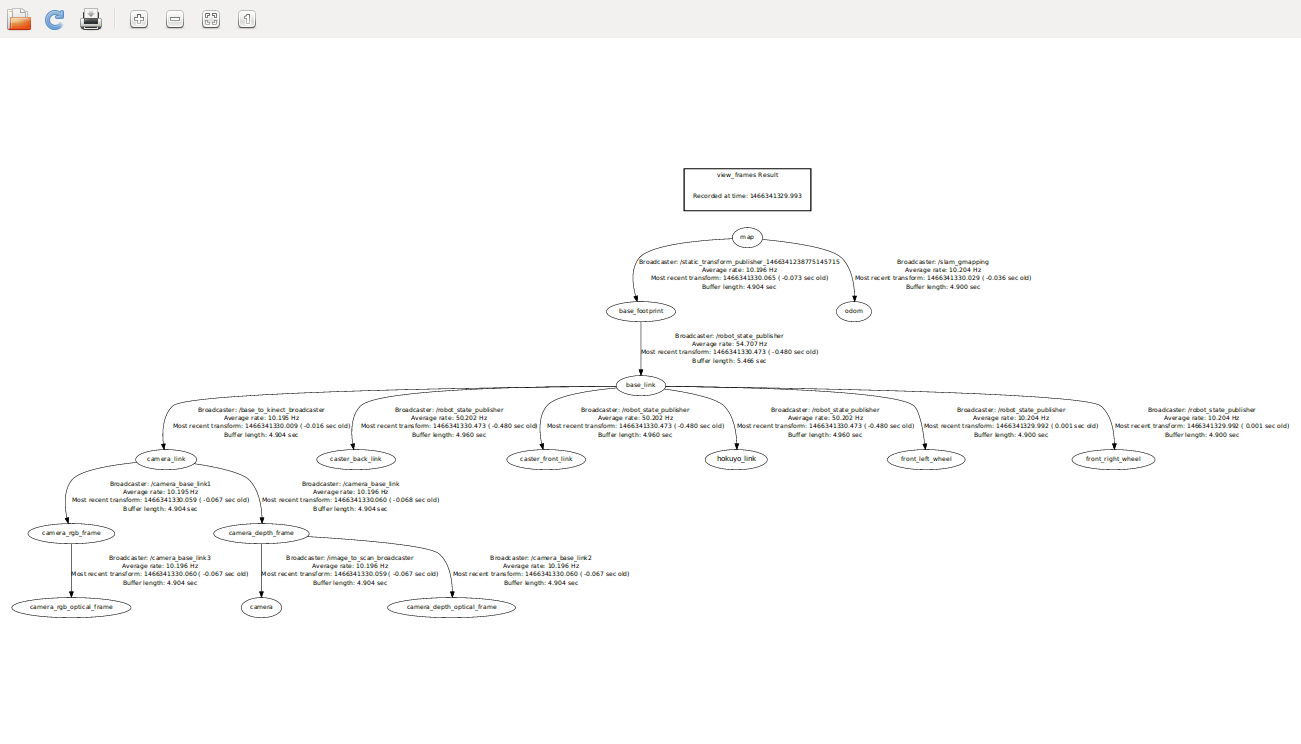
and it must run good base controller is running without any problem and publish the odom data the tf tree and rviz Screenshot from 2016-06-18 19:51:20.png Screenshot from 2016-06-18 19:52:30.png
i hope this can help.
note: you can find base_controller in this package https://github.com/sungjik/my_persona... I use it as a reference with some difference but the tf publish is the same . I am launch robot config and slam.launch from this package I hope this information will help.
note2: after adding this line befor launch
rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_footprint 100
no error occure in rviz but still the axises don't move when the robot move i still don't know why this is the tree after adding this line
it's make the map in the same place don't move and the in the odom data seq: 1839 stamp: secs: 1466341747 nsecs: 223550043 frame_id: /odom child_frame_id: /base_link pose: pose: position: x: 0.00107754043214 y: -0.000931717192192 z: 0.0 orientation: x: 0.0 y: 0.0 z: -0.260476129843 w: 0.96548028762
when the position change no change in the position of the robot while building the map.
note3: i use this befor the launch and this make appropriate tf tree
rosrun tf static_transform_publisher 0 0 0 0 0 0 odom base_footprint 100
and this is the tree
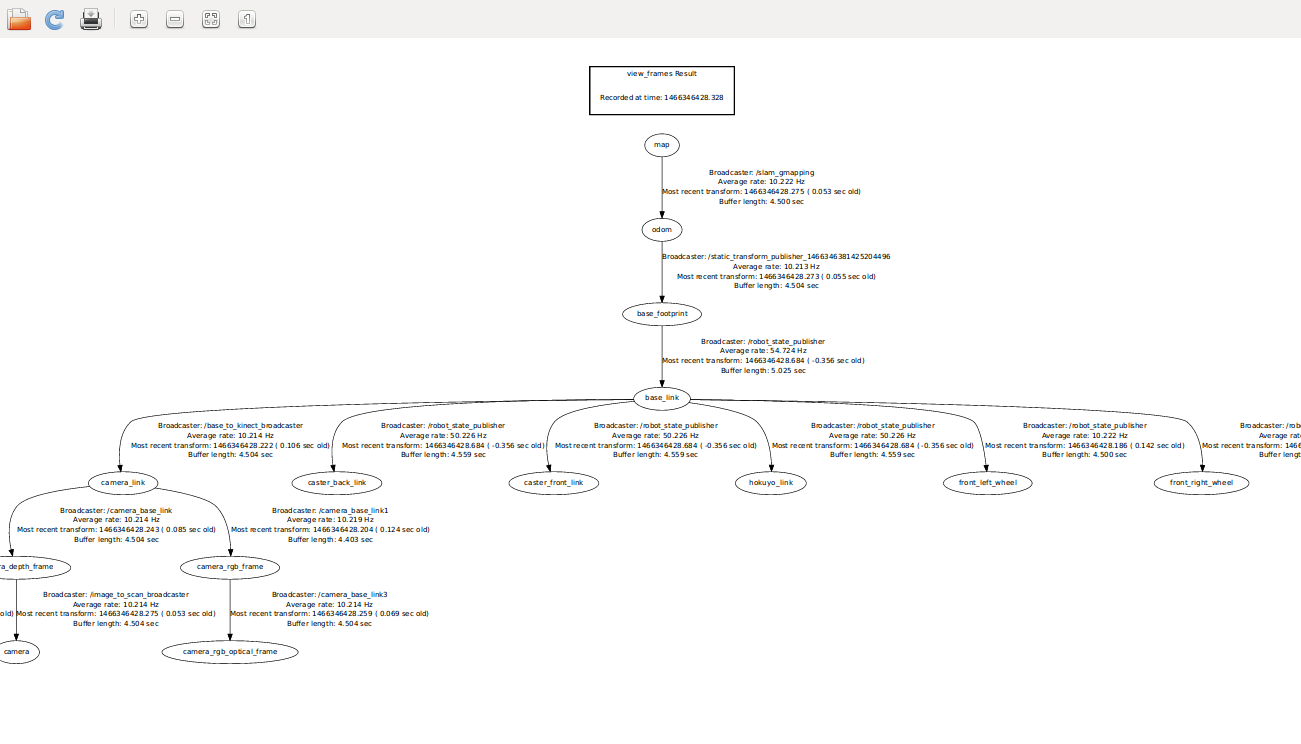
and here no problem occure in ...


{kind=link}
{kind=link}
Are you publishing map->odom transformation anywhere or is it there by default?
i use the control base from this package https://github.com/sungjik/my_persona... with some difference but still the method of publish tf is th same I hope this will help.
So basically some node name base_controller which belongs to beginner_tutorials pkg is publishing the tf for you? Is that correct?
Secondly, the problem is the missing connection between base_link and map frame. To set that up, try doing this in your terminal before launching your launch file:
rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_footprint 100
it feels like the sequence of tf is wrong. It should be like map->odom-> base_footprint-> base_link. For you, it odom comes after base_footprint, which feels weird.
this work but still the axises don't move when the robot move but in rviz no error occure every thing work fine but the axises don't move i don't know why
how i can solve this how i can make footprint child of odom and father of base linke i think this will solve move problem