
RPLIDAR+hector slam+laser pipeline
Hi everyone, i have very big problem... I'm using RPLIDAR 360° Laser Scanner to get the 3d map.
In this moment I'm using rplidar_ros and hector_slam library to get 2d mapping in rviz. Everything is working but I have problem with laser_pipeline. Normally when I am using hector_slam i have generated laserscan(/scan) and PointCloud(/slam_cloud). In theory it should be easy to use laser_pipeline libraries but... if I am doing everything like in this tutorial ( http://wiki.ros.org/laser_assembler/T... ) or if I am using original, not modified repository I always get only a circle of points like here: 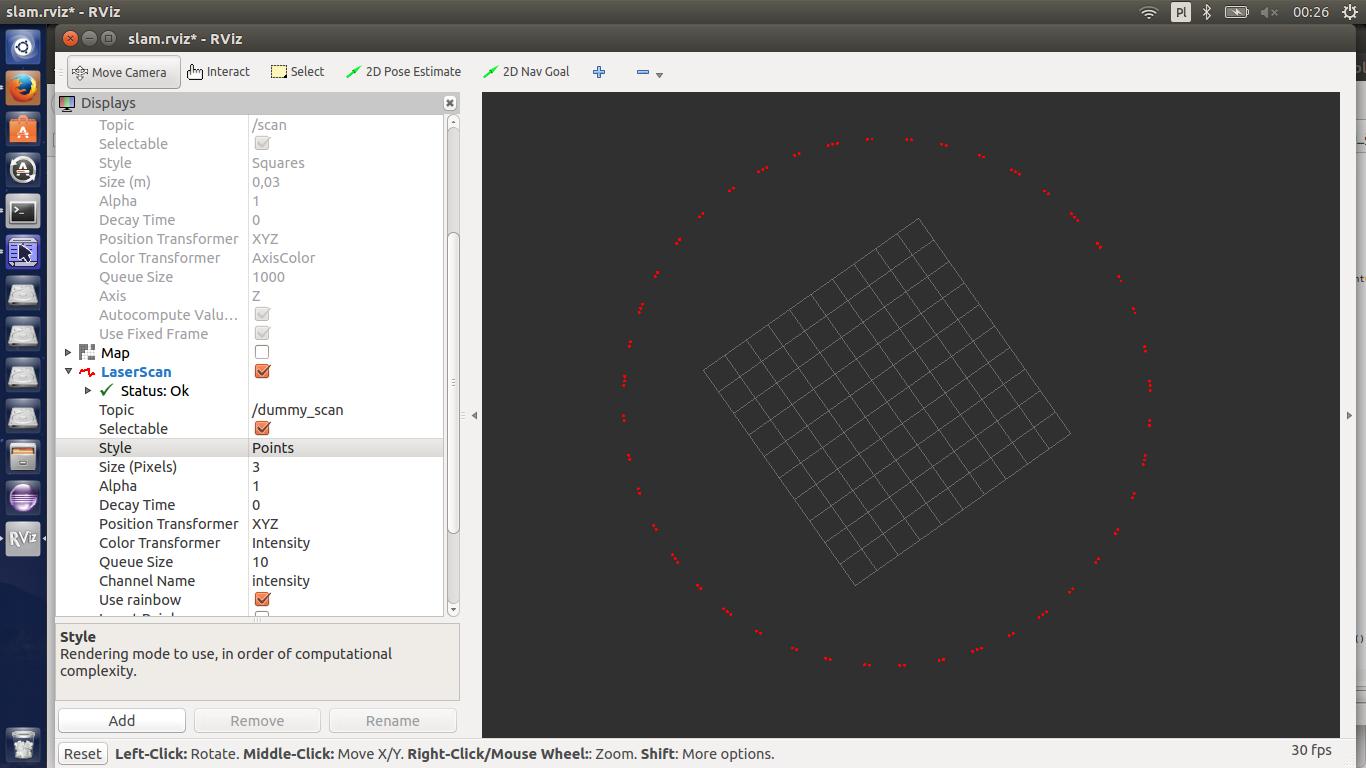 . Does anyone have any idea what am I doing wrong?
. Does anyone have any idea what am I doing wrong?
I am just a beginner so, if you need some of my files(I didn't modified any of them right now :) ) or have any propositoins about other library which I should use, please, tell me :)
Edit1: OK, I know why i have this points. It is because I am using "dummy_scan_producer" but honestly i have completly no idea how to use my data from my RPLIDAR 360... Anybody has any idea? Any solution?
