
Why Gazebo's/pose/info is changing dramatically when robot is not moving?
Hey,
So I found in Gazebo that I can see a window with a topic ~/pose/info (I assume its the same as echo). So I have my sample robot sitting in its starting position, I havent moved it at all, however position x keeps reducing and y keeps increasing.
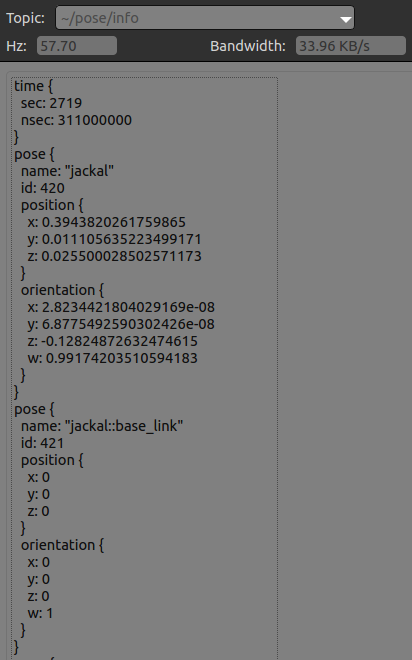
Here is another picture to prove you that those two variables are changing when robot's position stays the same after around 10 seconds.
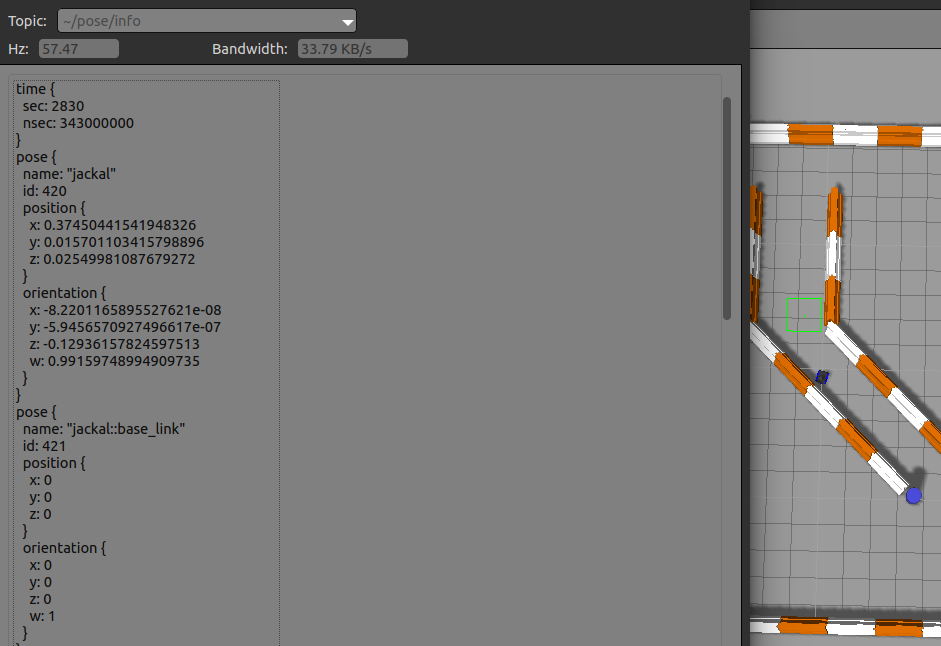
Why is this happening? I thought this would show me ground truth data that I could use in calculations later on.
add a comment

