
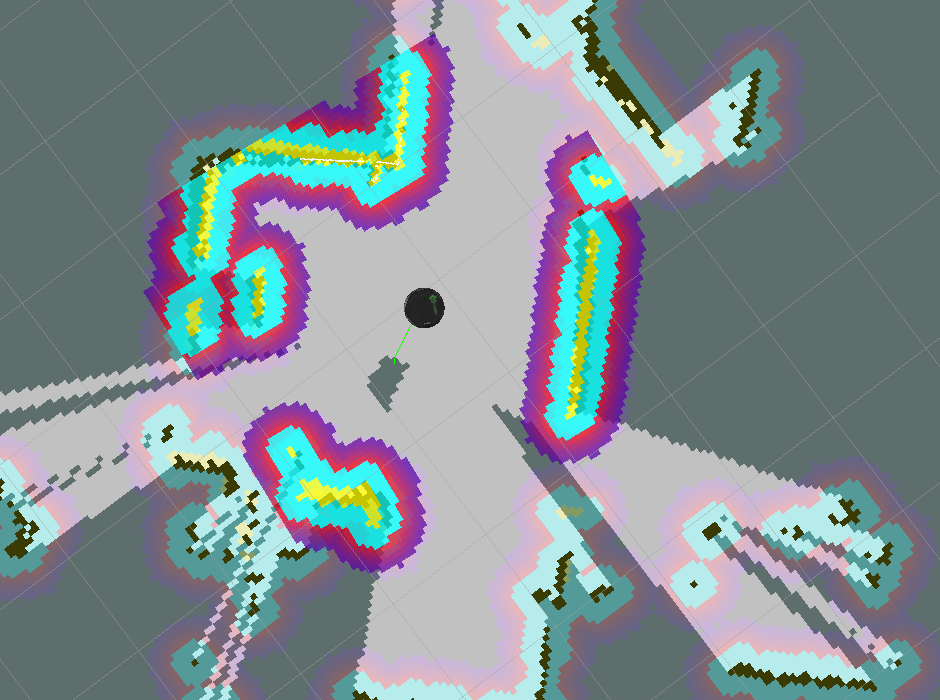
Why does move_base abort this path?
I'm using frontier_exploration to do autonomous mapping and this is the first goal that it sends the robot when it is initialized.
The robot can't move and I get these errors:
[ERROR] [1459373069.392635517]: Footprint spec is empty, maybe missing call to setFootprint?
[ WARN] [1459373069.393029517]: Invalid Trajectory 0.000000, 0.000000, 0.400000, cost: -9.000000
[ WARN] [1459373069.393286183]: Rotation cmd in collision
[ INFO] [1459373069.394777850]: Error when rotating.
[ INFO] [1459373069.490389850]: Got new plan
Eventually, all of the recovery behaviors fail and I get the error:
[ERROR] [1459373090.449866595]: Aborting because a valid control could not be found. Even after executing all recovery behaviors
[ERROR] [1459373090.450383095]: Failed to move
This can't be a problem with the costmaps because there aren't any obstacles nearby.
Any thoughts?

I think this is related to this http://answers.ros.org/question/20474...