
No costmap in local map [closed]
Hello all,
Recently, I use Raspberry Pi 2, iRobot Create 1 and XV-11 to build up an autonomous navigation robot. My robot can navigate itself with pre-established map, but I still have a problem with it.
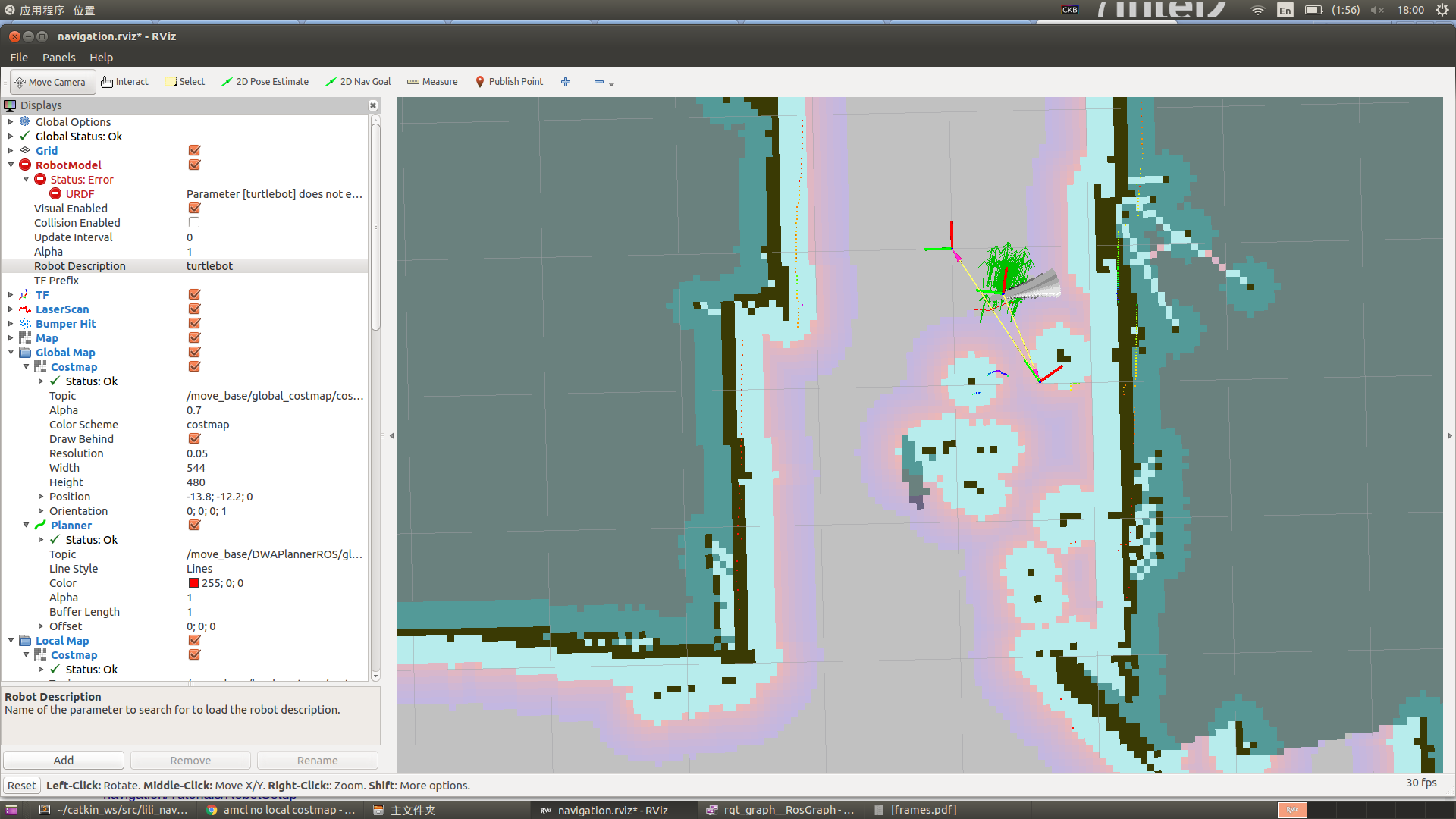
I get no costmap in local map section. I use the same parameters with turtlebot_navigation demo. It means that although my robot can avoid walls, doors and other static obstacles with amcl and map, it can not avoid temporary obstacles, such as people and trash bin which is not in the original map. I saw some videos on Youtube that others use this same approach, but they can get the local costmap. I don't know why about this issue. I tried to get topic message from the local costmap topic, but there are all zero values in the message.
Here is the screenshot of my rviz when running amcl:
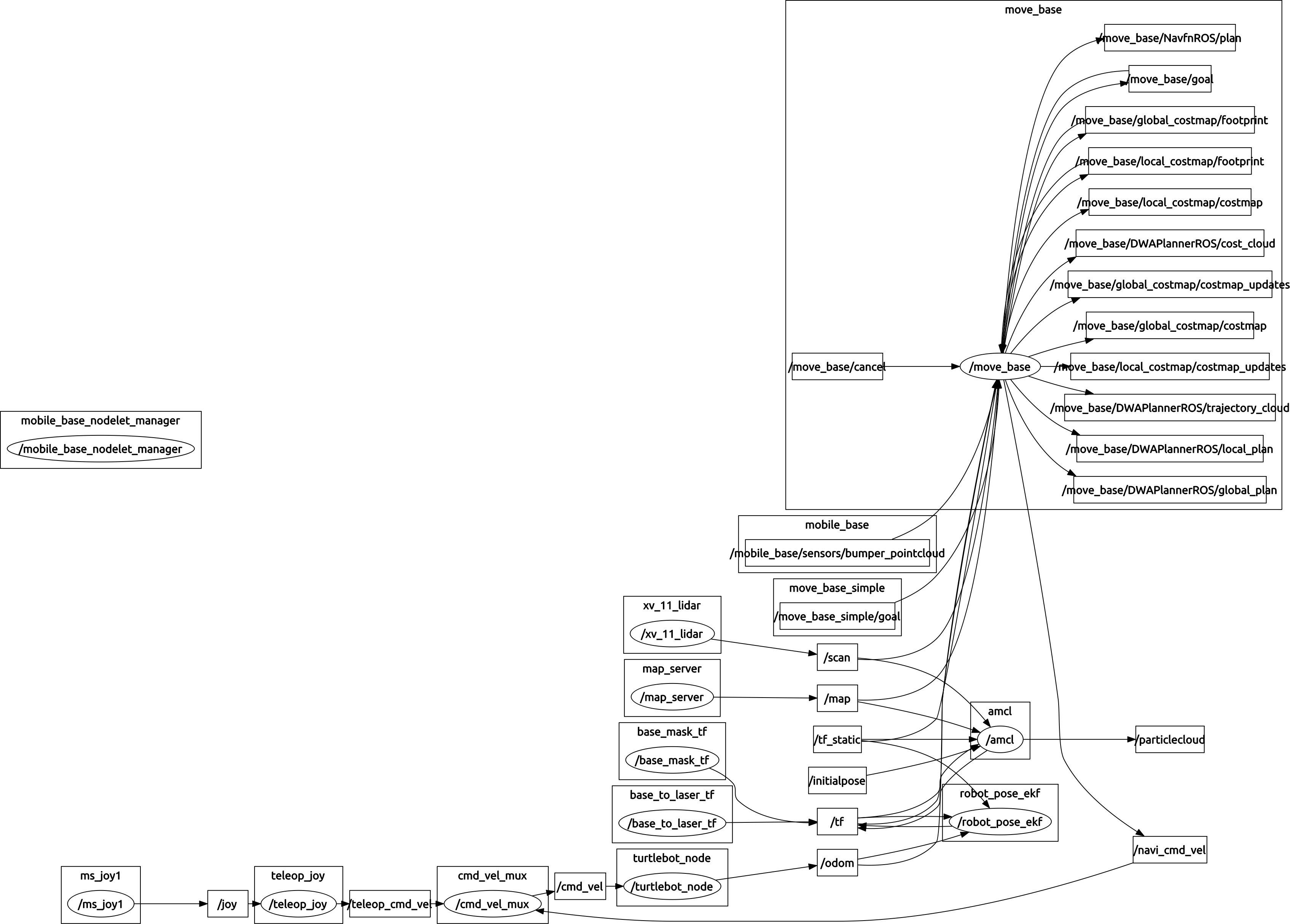
And this is the nodes graph of my program:


Are you sure that when you echo local cost map, all the values are zero? If so, can you check the observation sources of the local cost map( by running
rosparam get /move_base/local_costmap/obstacle_layer/observation_sources)?I'm having the same problem as of VERY recently. Up until a few weeks ago the local costmap was working just fine. Now it's all zeros even though the observation sources did not change. Edit: see my answer