
Visualize collada file on rviz [closed]
I exported a collada file through sketch up but am unable to figure out what the problem is. Here is my code! Status on Rviz is okay but cannot see any display! Please help
#!/usr/bin/env python
import rospy
from visualization_msgs.msg import Marker
marker = Marker()
marker.header.frame_id = "/surface"
marker.header.stamp = rospy.Time()
marker.ns = "primitive_surfaces"
marker.id = 0
marker.type = marker.MESH_RESOURCE
marker.action = marker.ADD
marker.pose.position.x = 0
marker.pose.position.y = 0
marker.pose.position.z = 0
marker.pose.orientation.x = 0.0
marker.pose.orientation.y = 0.0
marker.pose.orientation.z = 0.0
marker.pose.orientation.w = 1.0
marker.scale.x = 1
marker.scale.y = 1
marker.scale.z = 1
marker.color.a = 1.0
marker.color.r = 0.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.mesh_resource = "file:///home/swethmandava/catkin_ws/src/planning_inspection/planning_inspection_ros/nodes
/cuboid.dae";
pub = rospy.Publisher('surface', Marker, queue_size=1)
rospy.init_node('vis_surface')
rate = rospy.Rate(60)
while not rospy.is_shutdown():
pub.publish(marker)
rate.sleep()
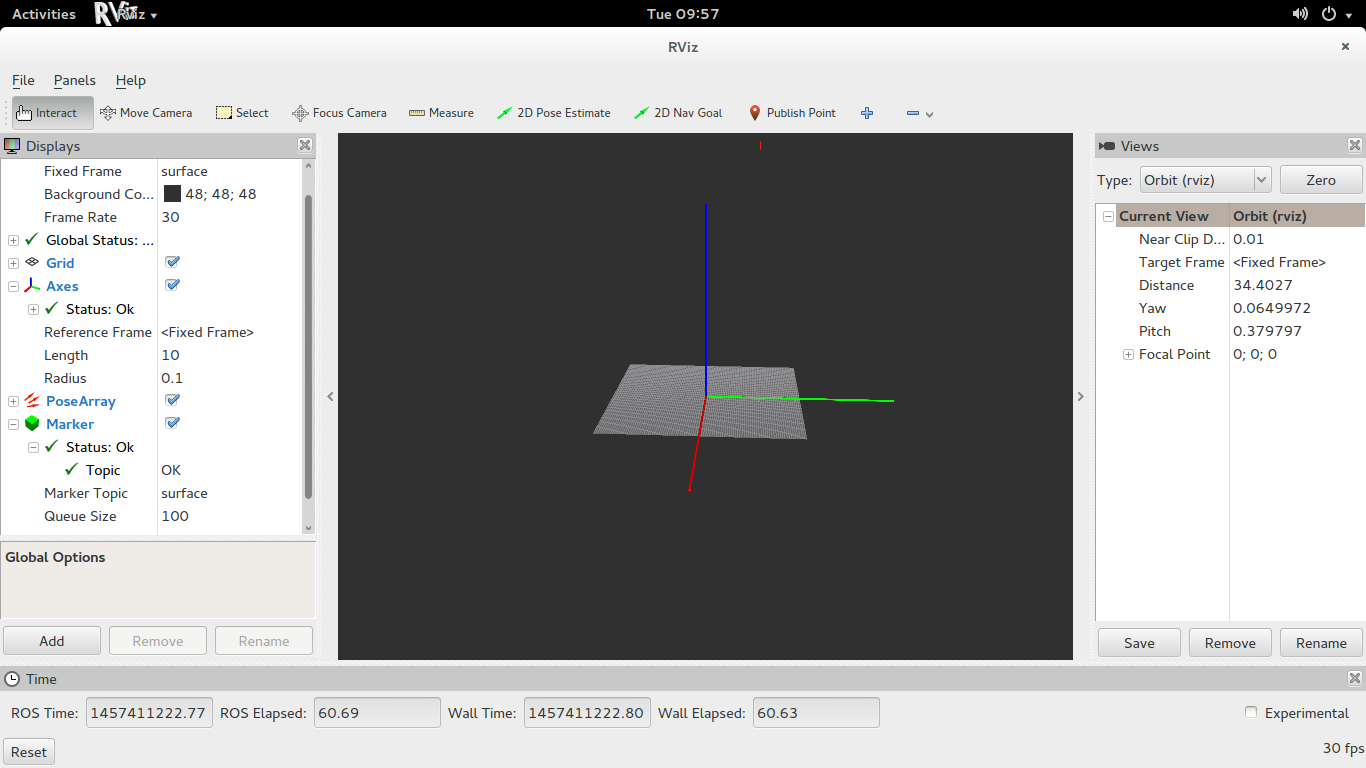
Edit: Included rviz screenshot and frame information
this is my tf frame:
#!/usr/bin/env python
import roslib
roslib.load_manifest('planning_inspection_ros')
import rospy
import tf
if __name__ == '__main__':
rospy.init_node('tf_broadcaster')
br = tf.TransformBroadcaster()
rate = rospy.Rate(10)
while not rospy.is_shutdown():
br.sendTransform((0.0,0.0,0.0), (0.0,0.0,0.0,1.0), rospy.Time.now(),"map", "surface")
rate.sleep()
Closed for the following reason
the question is answered, right answer was accepted by
swethmandava
close date 2016-03-08 02:41:52.957403
add a comment

