
rtabmap_ros loop closure rejection when doing tutorial
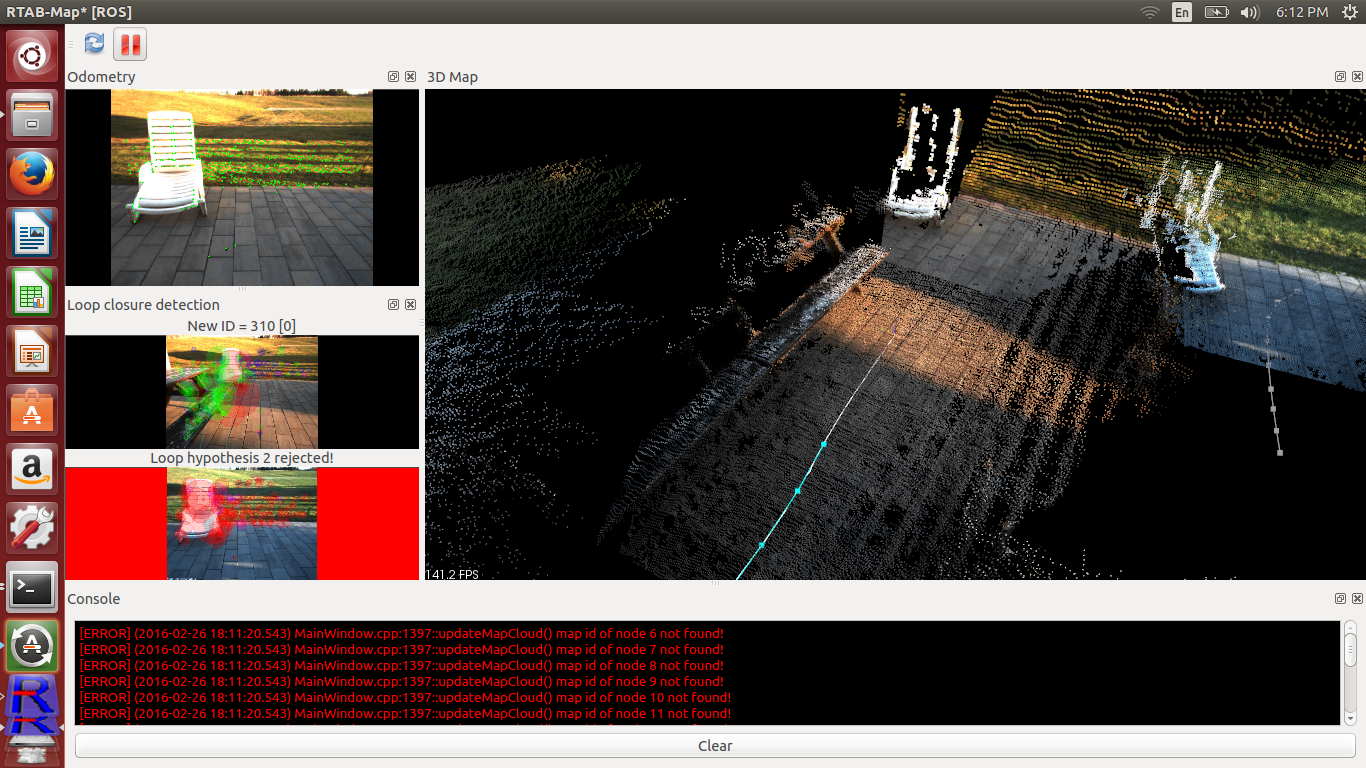
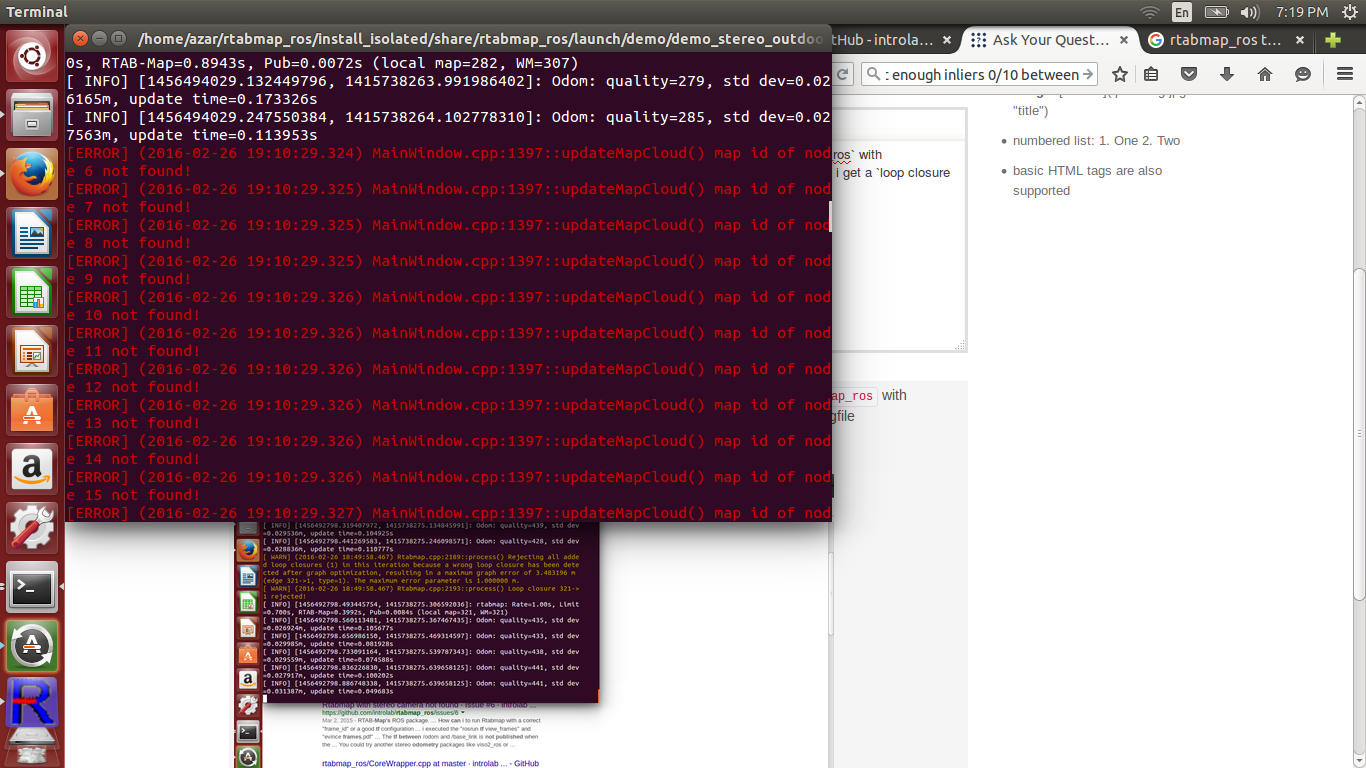
I am using ros indigo in ubuntu 14.04 when i am running the stereo outdoor tutorial in rtabmap_ros with Stereo_outdoorB.bag file as in :link i get a loop closure rejction error at the end of the bagfile
here I have atached the screenshots :
add a comment

