
Gazebo laser plug-in fails to publish scan results in rviz
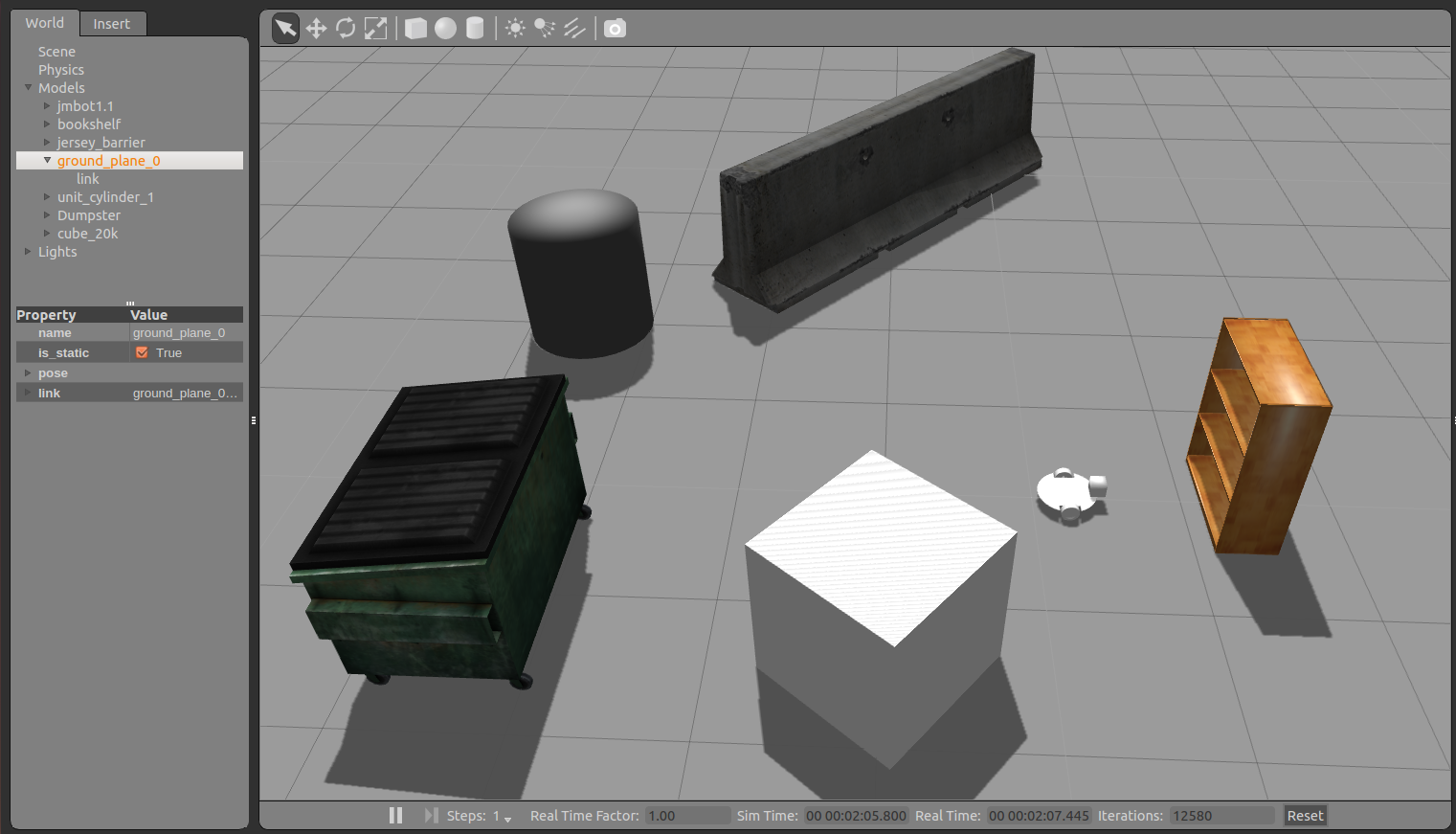
I have added differential drive plug-in and laser sensor (hokuyo) plug-in to my urdf file. I launched the robot in environment shown below and moved the robot using tele-operation.
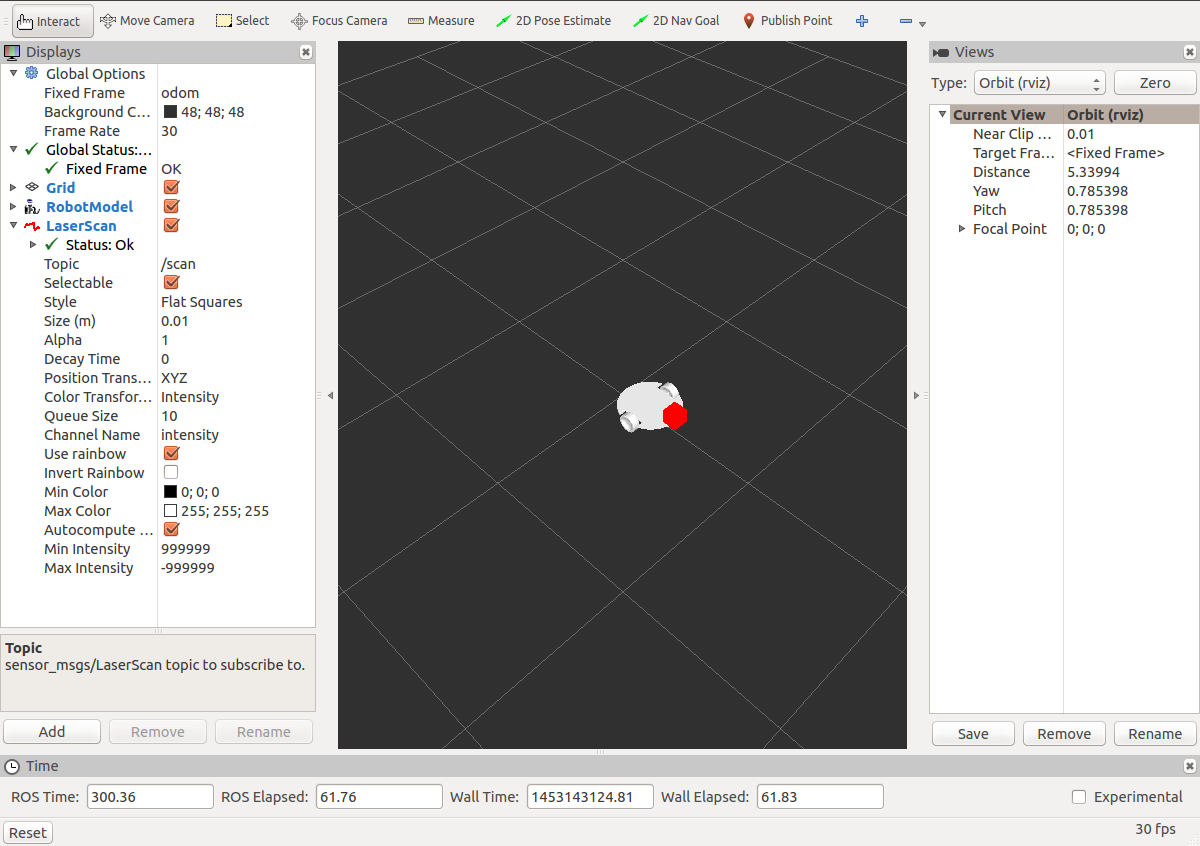
Then i launched the rviz and did the setup required to view the scan results fron laser plug-in but it failed (refer the pic below).
Following are my terminal result and result for rostopic echo /scan respectively.
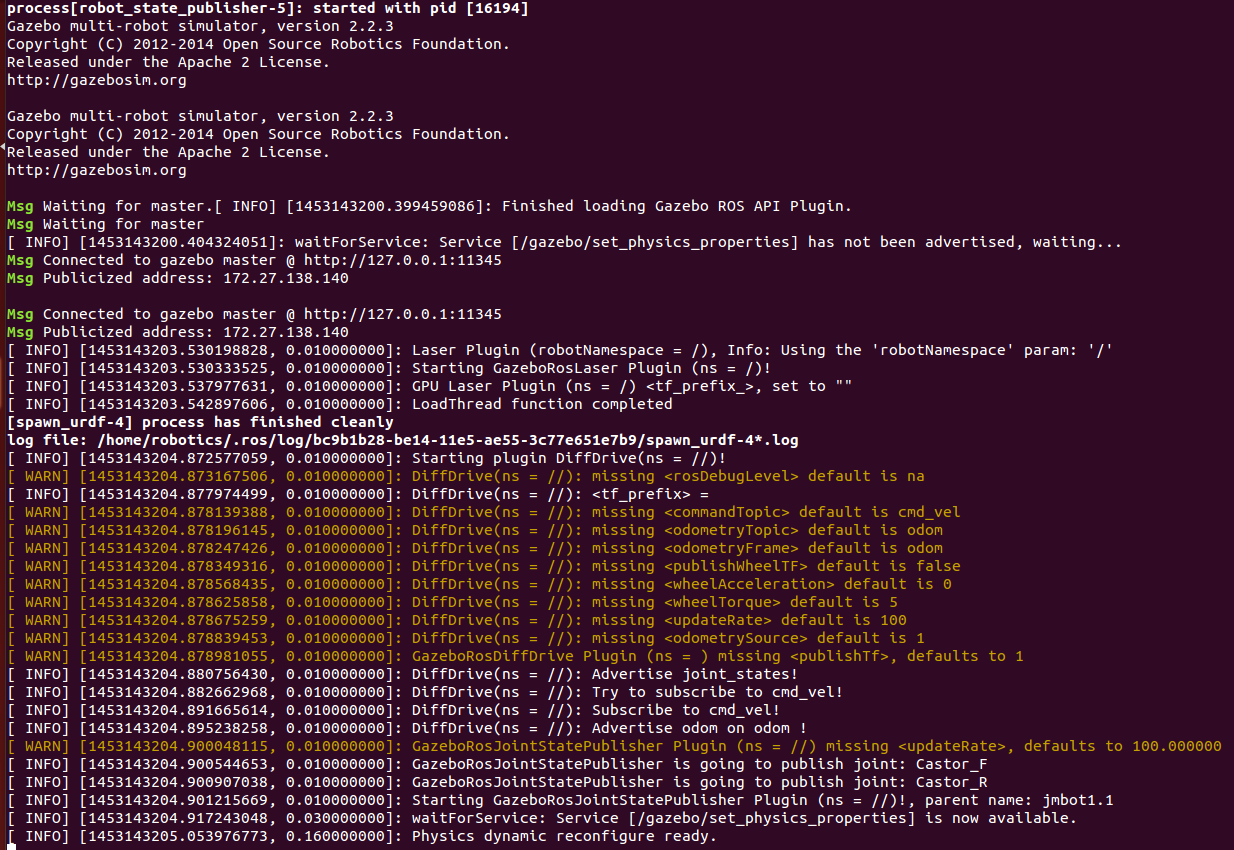

Where have i gone wrong how to fix this, does the warnings in terminal cause this problem?
Below is my plug-in code
Link:
<link name="hokuyo_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
<joint name="hokuyo_joint" type="fixed">
<axis xyz="0 1 0" />
<origin xyz="0 -0.055 0.2" rpy="0 0 0"/>
<parent link="Base_plate"/>
<child link="hokuyo_link"/>
</joint>
laser Controller
<gazebo reference="hokuyo_link">
<sensor type="gpu_ray" name="hokuyo">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>100</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
</ray>
<plugin name="gpu_laser" filename="libgazebo_ros_gpu_laser.so">
<topicName>/scan</topicName>
<frameName>hokuyo_link</frameName>
</plugin>
</sensor>
</gazebo>
My RQT result
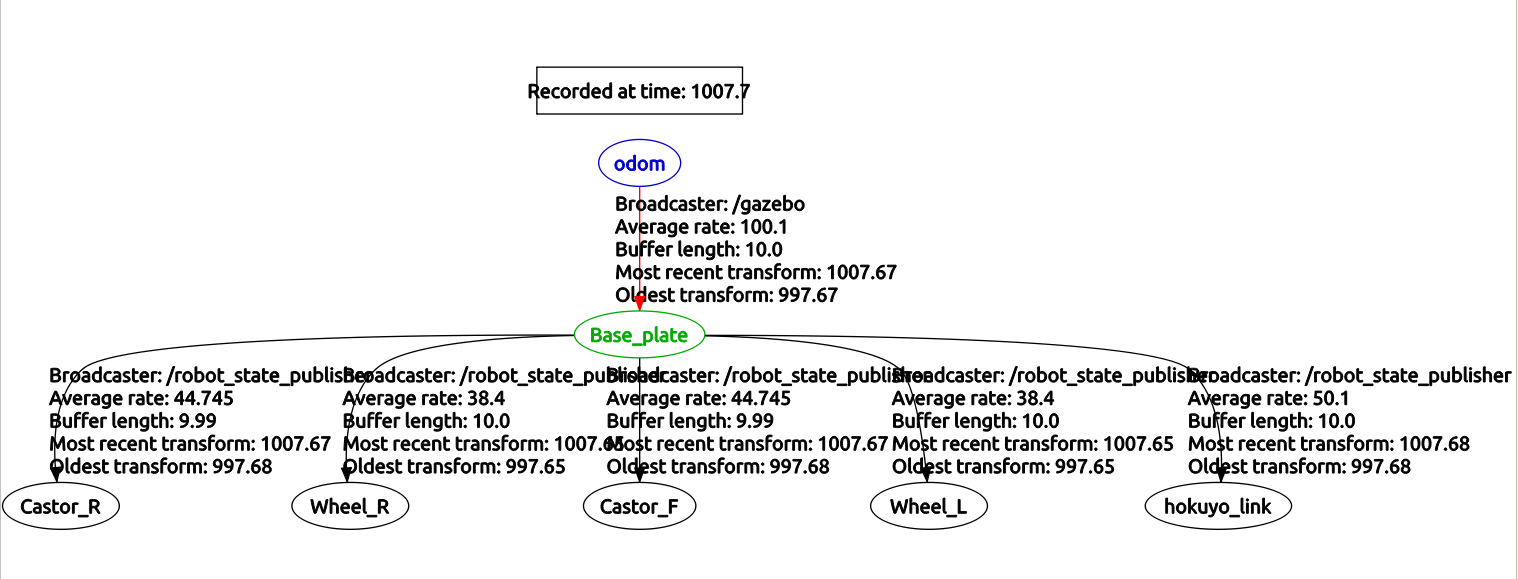


Have you used RQT to look at the TF graph? Is it complete from the odom frame to the hokuyo_link frame?
Yes, it seems to be fine. Please refer it above in my last edit.