
Not able to spawn basic shapes in rviz
I am following the tutorial on rviz here
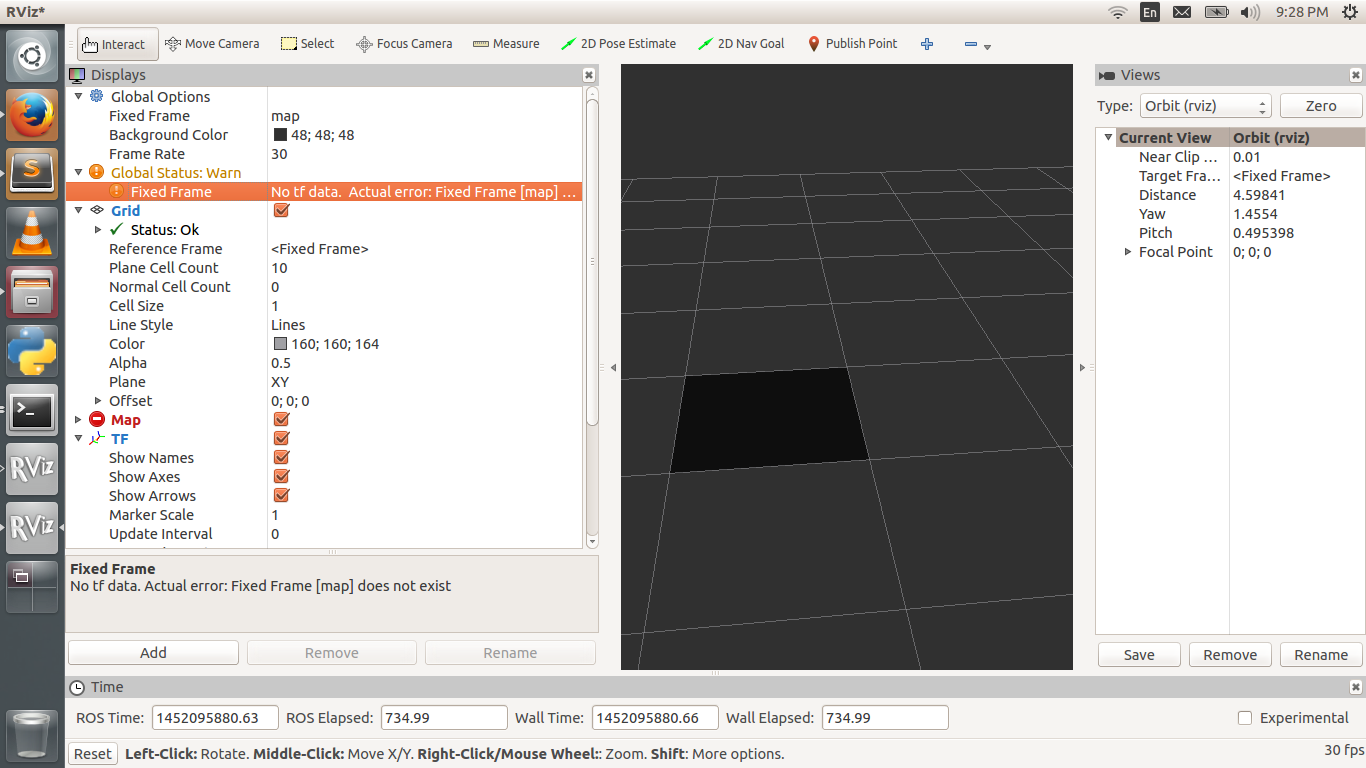
But i am not able to correct the TF global issue as in the screenshot.
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
I am following the tutorial on rviz here
But i am not able to correct the TF global issue as in the screenshot.
Try changing the rviz 'Global Options' 'Fixed Frame' to my_frame.
In the tutorial you are sending the markers position in the frame my_frame, but rviz is set to display map, and if you have not set any transforms to connect the frame map to my_frame rviz can't calculate the markers position in the map frame.
And you need to add a markers display to rviz (maybe you have already done this, but i can't see it in your screenshot). Just follow the Tutorials Point '5. Viewing the Markers'.
To change the Fixed Frame: Open rviz, klick on map (on the text next to Fixed Frame) and just type the new frame name my_frame. I thought i could choose the frame from a list, but i just built the tutorial program and tried it, but i had to type the name my_frame.
Rviz is often hiding (or it is not recognizable) that you can edit a parameter like Fixed Frame.
I think you are trying to change the Fixed Frame in Global Status, where you get the warning message. Try changing the Fixed Frame under Global Options.
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 /map /my_frame 10
Type this in another terminal to state the relation btw my_frame and map
Asked: 2016-01-06 10:15:46 -0500
Seen: 558 times
Last updated: Nov 02 '21
RViz doesn't load .dae mesh. Cannot locate it.
Cannot move robot to a custom pose with Moveit_commander
Rviz click tool to set exploration boundary
rosconsole DEBUG logger. How to use it?
Failed rviz package installing on indigo with rasberry pi 2
How to enable gpu acceleration on laptop for ros? [closed]
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

I tried changing the rviz 'Global Options' 'Fixed Frame' to my_frame. but nothing happened. I tried to run the command below too, but nothing changed too
the terminal doesn't show any other error.