
People detector in RGB-D pointclouds
Hello all;
I need to perform a people detector for security tasks in robot cells. My initial idea has been to make a ros node adapting the work from Matteo Munaro, from the PCL tutorials, as it fits quite well my initial idea: PCL people detector However, when I run it, I obtain continuously this error, that is, not detecting people:
[pcl::people::pcl::people::HeadBasedSubclustering::subcluster] Cluster indices have not been set!
[DEBUG] [1446646345.599799741]: 0 people found
[DEBUG] [1446646345.641495873]: Ground plane: 0.0261189 -0.995346 -0.0927586 1.17296
No groundplane update!
My pointcloud has this aspect, that complies with the requirements of the algorithm:
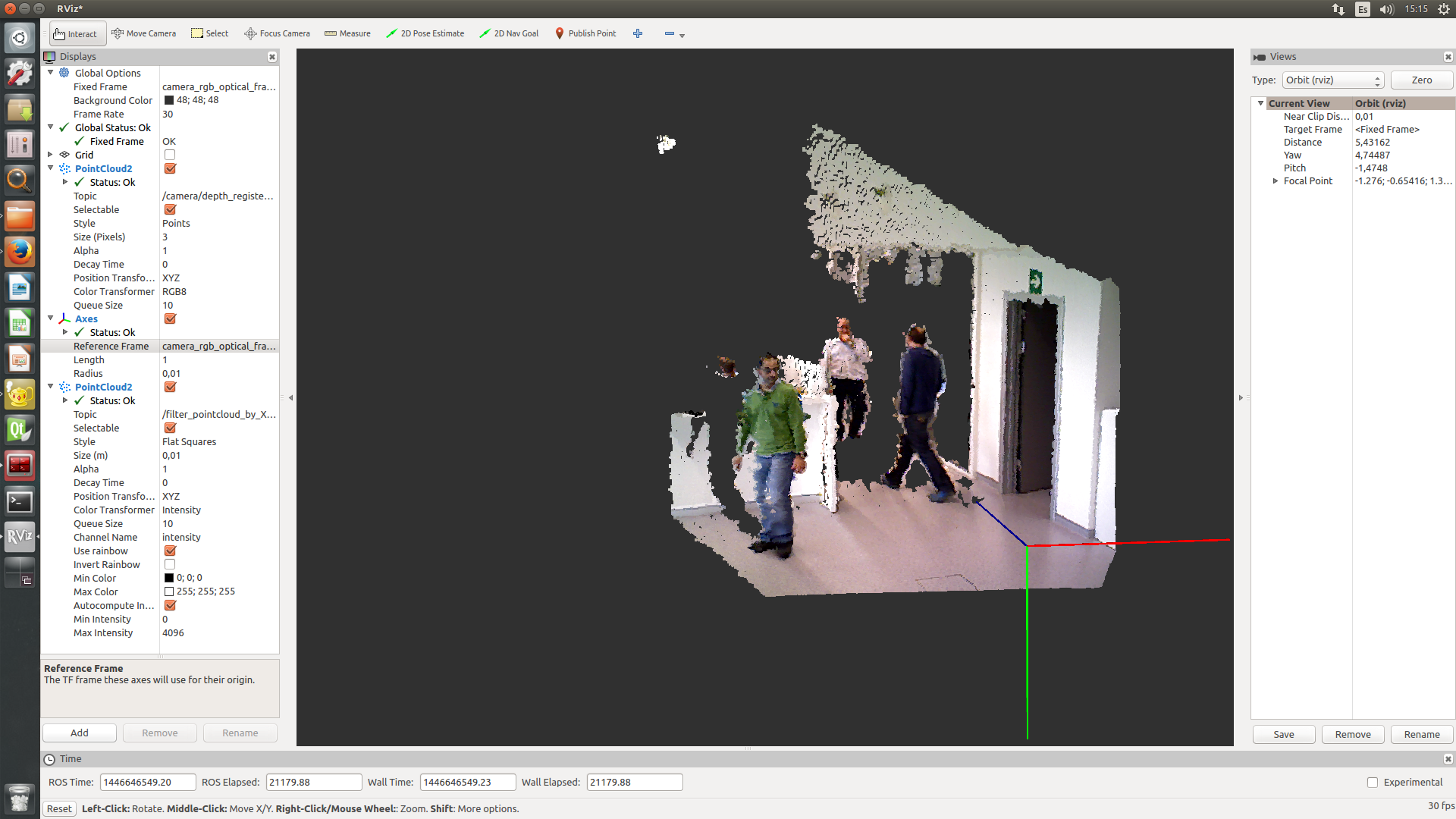
And my node code is also quite simple:
void initPeopleDetector(void)
{
// Create classifier for people detection:
groundCoeffs.resize(4);
personClassifier.loadSVMFromFile(clasifFile);
peopleDetector.setVoxelSize(voxelSize);
Eigen::Matrix3f rgb_intrinsics_matrix;
rgb_intrinsics_matrix << 525, 0.0, 319.5, 0.0, 525, 239.5, 0.0, 0.0, 1.0;
peopleDetector.setIntrinsics(rgb_intrinsics_matrix);
peopleDetector.setClassifier(personClassifier);
peopleDetector.setHeightLimits(minPersonHeight, maxPersonHeight);
}
void scenePointcloudCallback(const sensor_msgs::PointCloud2::ConstPtr& msg)
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr scene(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr floor(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::fromROSMsg (*msg, *scene);
sceneMutex.lock();
//floor segmentation
pcl::PassThrough<pcl::PointXYZRGBA> pass;
pass.setInputCloud (scene);
pass.setFilterFieldName ("x");
pass.setFilterLimits (x_min, x_max);
pass.filter (*floor);
pass.setInputCloud (scene);
pass.setFilterFieldName ("y");
pass.setFilterLimits (y_min, y_max);
pass.filter (*floor);
pass.setInputCloud (floor);
pass.setFilterFieldName ("z");
pass.setFilterLimits (z_min, z_max);
pass.filter (*floor);
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZRGBA> seg;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setDistanceThreshold (0.01);
seg.setInputCloud (floor);
seg.segment (*inliers, *coefficients);
groundCoeffs[0]= coefficients->values[0]; groundCoeffs[1]= coefficients->values[1];
groundCoeffs[2]= coefficients->values[2]; groundCoeffs[3]= coefficients->values[3];
ROS_DEBUG_STREAM("Ground plane: " << coefficients->values[0] << " " << coefficients->values[1] << " " << coefficients->values[2] << " " << coefficients->values[3]<<" ");
//people detection
std::vector<pcl::people::PersonCluster<pcl::PointXYZRGBA> > clusters;
peopleDetector.setInputCloud(scene);
peopleDetector.setGround(groundCoeffs);
peopleDetector.compute(clusters);
//update ground
groundCoeffs = peopleDetector.getGround();
int i=0,j=0;
for(std::vector<pcl::people::PersonCluster<pcl::PointXYZRGBA> >::iterator it = clusters.begin(); it != clusters.end(); ++it)
{
if(it->getPersonConfidence() > minConfidence)
{
//Centroid, min and max points
Eigen::Vector3f centroid = clusters[j].getCenter();
Eigen::Vector3f minPoints = clusters[j].getMin();
Eigen::Vector3f maxPoints = clusters[j].getMax();
//draw a marker
mark_cluster(centroid, minPoints, maxPoints,scene->header.frame_id, "person" ,i, 255, 0, 0);
i++;
}
j++;
}
ROS_DEBUG_STREAM(" "<< i << " people found" << " ");
sceneMutex.unlock();
}
Could anyone give me a hint about what is wrong in the procedure? Is there any other method in ROS to detect people in open environments using RGB-D pointclouds? I have been looking at ROS wiki, and I cannot find any suitable solution....
Thank you all in advance,
Alberto
add a comment

