
Local costmap has unknown space where no obstacle in laser range
Hi,
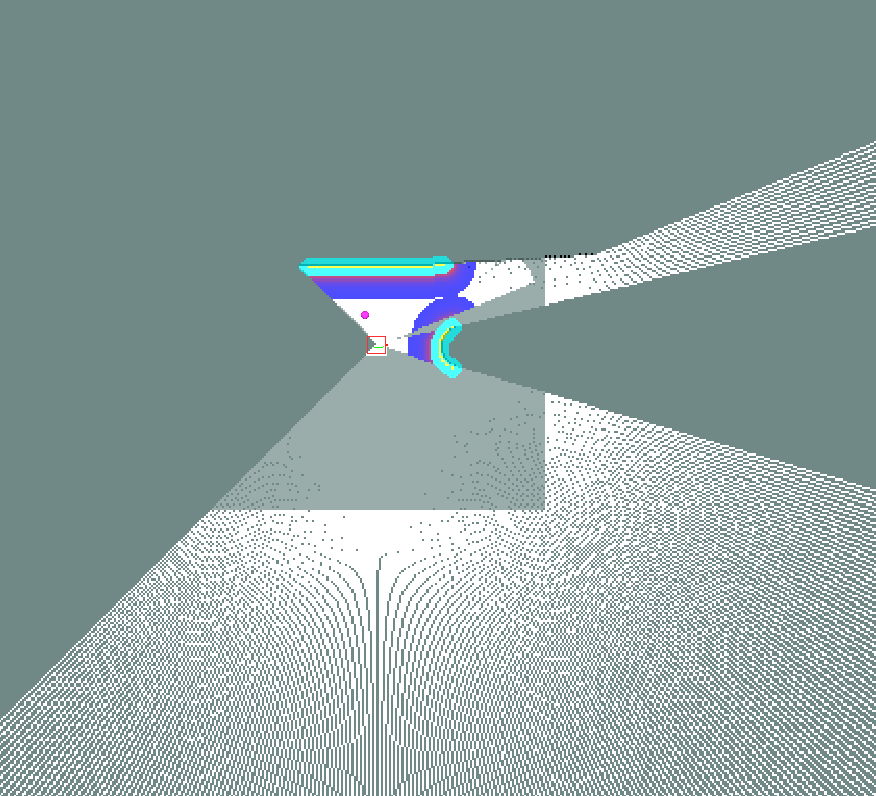
in my simulations the local costmap has unknown space for directions where there is no obstacle, see image:
I think it should be the same or a similar problem described here: http://answers.ros.org/question/19017...
How do I fix this? The other thread also offers no clear solution.
Thanks, Micha
add a comment
